
ID : 4604
ロボットハンド設計上の注意点
ロボットのハンドを設計するときは、以下の項目を満足するように設計してください。満足しない場合は、故障発生の原因になります。
ロボットハンド設計上の注意点を守らないと、ロボット本体の各締結部にゆるみ・ガタが発生し、位置ズレやロボットのメカ部品およびロボットコントローラの破損の原因になる恐れがあります。
ハンド質量
ハンド・ツール(ワークも含む)の総質量の最大値が、ロボットの最大可搬質量以下になるように設計してください。
配線・配管ステーなどをロボット本体に取り付けた場合、そのステーおよび配線・配管の質量も含めてハンド質量としてください。
| ハンド・ツール総質量最大値 ≦ 最大可搬質量 (ワーク重量を含む) (お客様設定の先端負荷質量の値) |
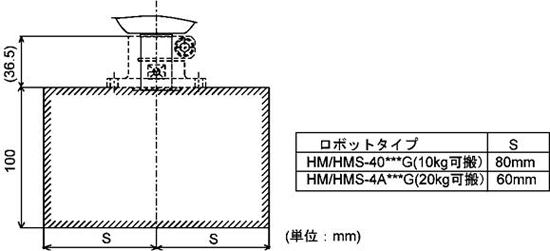
ハンド重心位置
ハンド・ツール(ワークも含む)の重心位置が、HMシリーズは下図に示す範囲になるように設計してください。
|
T軸回り慣性モーメント
ハンド・ツール(ワークも含む)のT軸回り慣性モーメントが、ロボットのT軸最大許容慣性モーメント以下になるように設計してください。
| ハンド・ツールT軸回り慣性モーメント ≦ 最大許容慣性モーメント (ワーク重量を含む) |
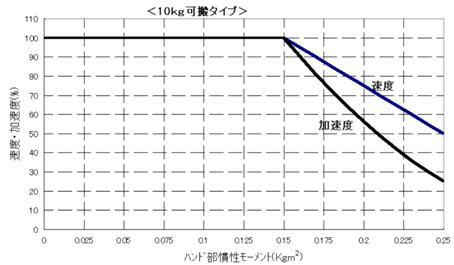
最大許容慣性モーメントは、下図のグラフから求めてください。
速度・加速度はともに個別に設定ができますが、個別に設定しない場合は速度を設定すると加速度は次式のように加速度が設定されます。
加速度(%)=(速度(%)/100)2×100 個別で速度・加速度を設定する場合は、下図の範囲で設定してください。
ハンド・ツールのT軸回り慣性モーメントを求めるときには、慣性モーメント計算式を参考にしてください。
適用例: HM/HMS シリーズ 10kg可搬タイプ
- 速度・加速度とも100%で使用する場合:T軸回り慣性モーメントは0.15kgm2以下に設計します。
- T軸回り慣性モーメントが0.17kgm2の場合:速度90%、加速度81%以下で使用します。
 |
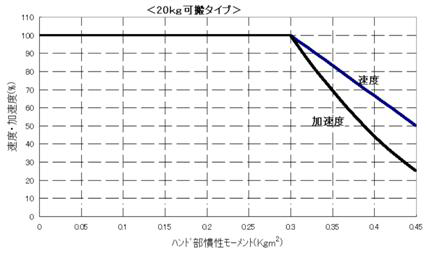
適用例: HM/HMS シリーズ 20kg可搬タイプ
- 速度・加速度とも100%で使用する場合:T軸回り慣性モーメントは0.3kgm2以下に設計します。
- T軸回り慣性モーメントが0.33kgm2の場合:速度90%、加速度81%以下で使用します。
 |
ID : 4604
- このページに関連する情報
- 慣性モーメント計算式