
ID : 3423
フランジの取り付け
1
ロボット本体に食品用ロボットジャケット用のフランジを取り付けます。
フランジを取り付ける時には、以下の軸角度の姿勢にすると取り付けがしやすくなります。
| 軸 | 角度 | |
|---|---|---|
| J1軸 | 0° |  |
| J2軸 | 0° | |
| J3軸 | 90° |
|
| J4軸 | 0° |
|
J5軸 |
-90° | |
| J6軸 | 0° | |
2
標準タイプのロボットの場合、6軸部に6軸クロスローラ保護用カバーを固定します。
防滴タイプのロボットには必要ありません。
取り付けの際には、同梱の十字ねじ(M3×10)をご使用ください。
- 取り付けねじサイズ:M3X10
- ねじ締め付けトルク:0.59Nm +/-20%
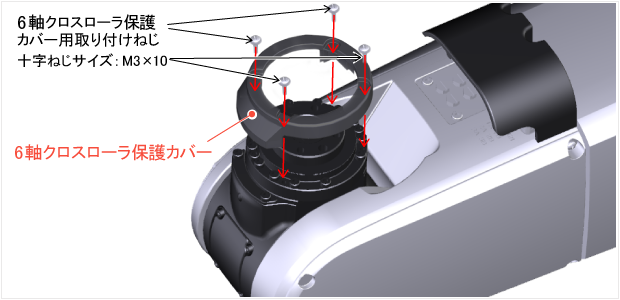
保護用カバーを取り付けない場合、ロボットの動きによってはジャケットや配線が傷つき、ジャケットの寿命低下につながります。
3
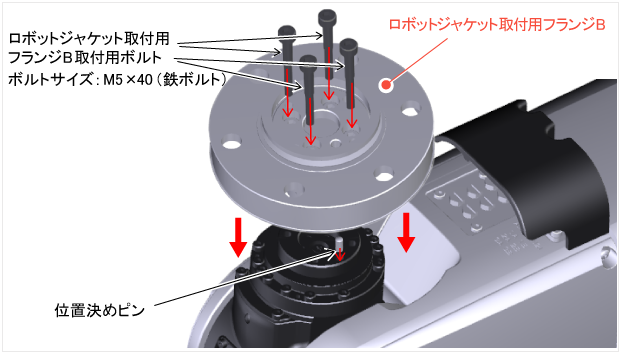
ロボットジャケット取付用フランジBを付属のボルトおよび位置決めピンで固定してください。
ボルトのサイズと締め付けトルクは以下の通りです。
- 取り付けボルトサイズ:M5X40mm
- ボルト締め付けトルク:5.9Nm +/-20%
フランジを取り付ける際はアルコールなどで外部表面を脱脂してから組み付けてください。
4
ロボットジャケット取付用フランジAを付属のボルトで固定してください。
ボルトのサイズと締め付けトルクは以下の通りです。
- 取り付けボルトサイズ:M5X30mm
- ボルト締め付けトルク:5.2Nm +/-20%
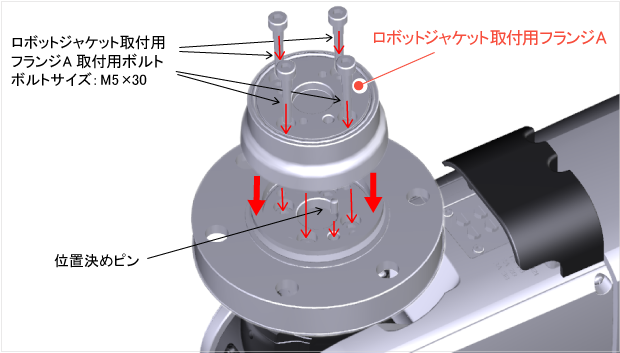
フランジAの裏にはシール(ゴム)がついており、フランジBとあわせることでフランジAとフランジBを密着させることができます。
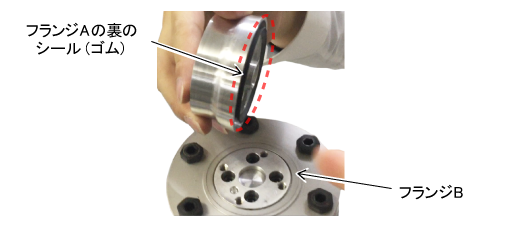
フランジAを組み付けるときは、上記STEP3のようにフランジBの取付面に対して真っすぐ取り付け、フランジAの裏のシール(ゴム)がつぶれないよう注意してください。
5
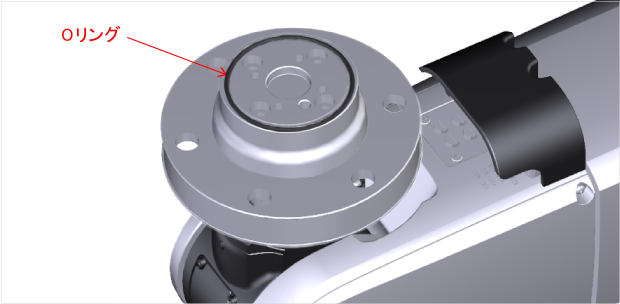
フランジAにOリングを取り付けます。(ロボットハンド周辺に水滴がかかる可能性がある環境の場合)
Oリング接触面の面粗度はRz6.3(Ra1.6)で設計してください。また、接触面仕上げでは送り加工をしないようにしてください。条件を満たさない場合、洗剤などの液体でジャケットをロボットに取り付けたまま洗浄しますと、液体がロボットジャケット内部に侵入する可能性があります。
ID : 3423