
ID : 3411
増設のLANボードを使用してマスタとスレーブ間を通信する場合
下図のように、増設LANボードを使用して、マスタとスレーブ間を通信する場合、"マルチキャスト.インターフェース [IP Address]"というパラメータを、初期値から変更する必要があります。
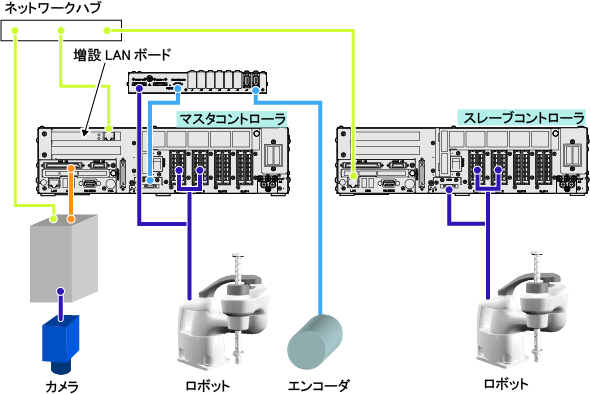
"マルチキャスト.インターフェース [IP Address]"には、増設LANボードに対して設定したIPアドレスをそのまま入力します。
まず、増設LANボードのIPアドレスの設定方法を説明します。
増設LANボードのIPアドレスの設定方法
次の操作経路で操作すると、下図の[通信設定]ウィンドウが表示されます。
操作経路 : [F6 設定] - [F5 通信と起動権] - [F2 ネットワークと通信権] |
デュアルアーム制御機能を使用しているロボットコントローラに対して設定する場合は、Robot0とRobot1のどちらが選択されていても問題ありません。この設定は、Robot0とRobot1で共通の設定です。
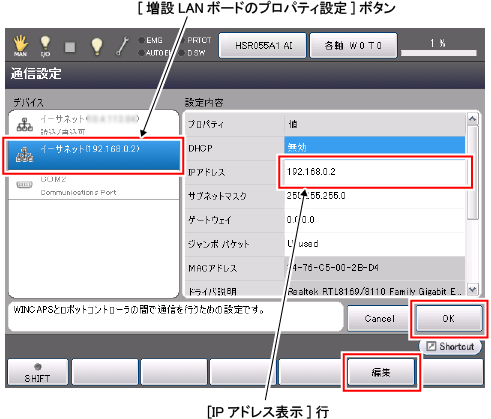
上図の[増設LANボードのプロパティ]ボタンは、増設LANボードを装着していると表示されます。そのボタンを押し、右側の[設定内容]枠にある、IPアドレスを変更します。
変更するには、まず、[IPアドレス表示]行を選択します。[IPアドレス表示]行が青くマーキングされます。その状態で、[F5 編集]を押すと、[IPアドレス入力]ウィンドウが表示されるので、そこでIPアドレスを入力後、[IPアドレス入力]ウィンドウの[OK]ボタンを押します。
最後に、[通信設定]ウィンドウ自体の[OK]ボタンを押します。
"マルチキャスト.インターフェース [IP Address]"の設定方法
"マルチキャスト.インターフェース [IP Address]"を設定するには、ユーザレベルを「メンテナ」にして、次の操作経路で操作し、下図の[コンベアトラッキング]ウィンドウを表示させます。
操作経路 : [F10 トラッキング] - [F12 詳細] |
デュアルアーム制御機能を使用しているロボットコントローラに対して設定する場合は、Robot0とRobot1のどちらが選択されていても問題ありません。この設定は、Robot0とRobot1で共通の設定です。
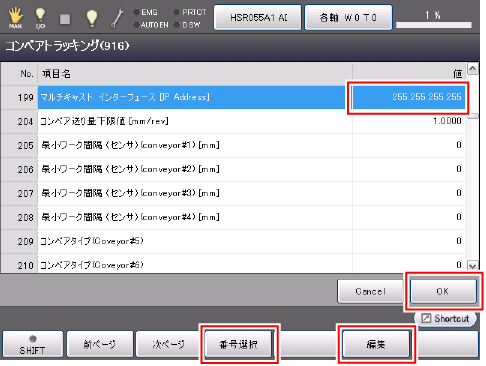
[コンベアトラッキング]ウィンドウで、"マルチキャスト.インターフェース [IP Address]"を選択します。"マルチキャスト.インターフェース [IP Address]"は199番目のパラメータなので、[F3 番号選択]で199を指定すると、直接"マルチキャスト.インターフェース [IP Address]"を選択できます。
その後、[F5 編集]を押すと、[IPアドレス入力]ウィンドウが表示されるので、増設LANボードに対して設定したIPアドレスを入力します。
[IPアドレス入力]ウィンドウの[OK]ボタンを押した後、最後に[コンベアトラッキング]ウィンドウ自体の[OK]ボタンを押します。
"マルチキャスト.インターフェース [IP Address]"を設定するロボットコントローラ
"マルチキャスト.インターフェース [IP Address]"の設定は、増設LANボードを装着しているロボットコントローラに対して行ってください。冒頭の図では、マスタコントローラに装着しているので、マスタコントローラに対して設定を行います。スレーブコントローラに装着しているのであれば、スレーブコントローラに対して設定を行ってください。
ID : 3411