| パラメータ名 |
データ型 |
有効範囲 |
初期値 |
省略 |
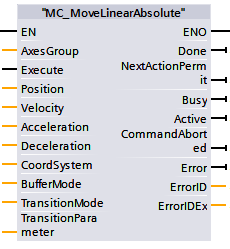
| AxesGroup |
Int |
1以上 |
1 |
不可 |
- ロボット番号
- 制御するロボット(ロボットコントローラ)に対応付けた、変数"Robots[n]" (データブロック"DB_DENSO_ROBOTS (DB2990)"の中にある変数) の要素番号を指定します。
有効範囲を超えた値を指定すると、CPU(PLC)が停止します。
-
有効範囲の最大値は、変数"Robots[n]"の最大要素番号です。最大要素番号の初期値は10ですが、お客様で増減可能です。
|
| Execute |
Bool |
|
False |
不可 |
- 実行開始
- FalseからTrueに変化すると、このFBを実行します。
|
| Position |
eRC_Position |
不可 |
- 目標位置
- 目標位置を位置座標(ポジション型)で指定します。単位は以下のとおりです。
-
X,Y,Z : "mm"
RX,RY,RZ : "Deg"
FIG : "-"
J5 ~ J8 : 回転軸 "Deg" / 直動軸 "mm"
制御するロボットにはない要素に値を入れても、ロボットコントローラはその値を無視します。
例えば4軸ロボットを制御するときに、変数"RX"に値を入れても、ロボットコントローラはその値(変数"RX")は使用せずにロボットを制御します。
|
| Velocity |
Real |
0.1 ~ 100.0 |
-1 |
可能 |
- 内部速度
- 目標位置へ移動する時の内部速度を指定します。単位は"%"です。
有効範囲内の値とは別に、-1と0も使用できます。
-
-1 : ロボットは現在の内部速度で移動する。
0 : 有効範囲の最小値"0.1"が適用される。
|
| Acceleration |
Real |
0.0001 ~ 100.0 |
-1 |
可能 |
- 内部加速度
- 目標位置へ移動する時の内部加速度を指定します。単位は"%"です。
有効範囲内の値とは別に、-1と0も使用できます。
-
-1 : ロボットは現在の内部加速度で移動する。
0 : 有効範囲の最小値"0.0001"が適用される。
|
| Deceleration |
Real |
0.0001 ~ 100.0 |
-1 |
可能 |
- 内部減速度
- 目標位置へ移動する時の内部減速度を指定します。単位は"%"です。
有効範囲内の値とは別に、-1と0も使用できます。
-
-1 : ロボットは現在の内部減速度で移動する。
0 : 有効範囲の最小値"0.0001"が適用される。
|
| CoordSystem |
eRC_CoordSys |
- Tool : 0 ~ 63
- Work : 0 ~ 7
|
|
可能 |
- 座標系選択
- ロボットを動作させるときの、ツール座標系とワーク座標系を、座標番号で指定します。
有効範囲内の値とは別に、-1も使用できます。
-1を指定すると、現在設定されている座標系でロボットは動作します。
例えば変数"Tool"に-1を入れると、現在設定されているTool番号のTool座標系で、ロボットは動作します。
|
| BufferMode |
Int |
0,1,6,7,8,9 |
-1 |
可能 |
- バッファモード選択
- ロボットが動作中にこのFBを実行したとき、どのように動作をつなげるかを指定します。
各バッファモードの処理の流れは以下のとおりです。
[ 0 : Aborting OP0(中断) ]
- ロボットは減速度100%で減速する。
- ロボットは停止する(エンド動作)。
- このFBの動作を実行する。
[ 1 : Buffered(保持) ]
- ロボットは現在の目標位置まで移動する。
- ロボットは停止する(エンコーダ値確認動作(軸座標))。
- このFBの動作を実行する。
[ 6 : Blending(混在) ]
- ロボットは現在の目標位置の近傍まで移動する。
- ロボットは入力パラメータ"TransitionMode"で指定した動作終了方法を実施する。
- このFBの動作を実行する。
[ 7 : Aborting OP1(中断) ]
- ロボットは減速度100%で減速する。
- ロボットは停止しない(パス動作)。
- このFBの動作を実行する。
[ 8 : Aborting OP2(中断) ]
- ロボットは現在の減速度で減速する。
- ロボットは停止する(エンド動作)。
- このFBの動作を実行する。
[ 9 : Aborting OP3(中断) ]
- ロボットは現在の減速度で減速する。
- ロボットは停止しない(パス動作)。
- このFBの動作を実行する。
|
| TransitionMode |
Int |
0,3,10,11 |
-1 |
可能 |
- 遷移モード選択
- 入力パラメータ"BufferMode"で、"6 : Blending(混在)"を指定したときの、現在の動作の終了方法を指定します。
各値に対する終了方法は以下のとおりです。
[ 0 : ロボットは停止する(エンコーダ値確認動作(軸座標)) ]
[ 3 : ロボットは停止しない (距離指定パス動作) ]
- 3を指定した場合、入力パラメータ"TransitionParameter"でパス動作をし始める距離を指定してください。
- [ 10 : ロボットは停止しない (パス動作)]
[ 11 : ロボットは停止する (エンコーダ値確認動作(位置座標)) ]
|
| TransitionParameter |
Int |
0 ~ 32767 |
-1 |
可能 |
- 遷移パラメータ
- 入力パラメータ"TransitionMode"で"3 : ロボットは停止しない (距離指定パス動作)"を指定したときの、パス動作をし始める距離を指定します。単位は"mm"です。
ロボットの位置と、現在の目標位置との距離が、このパラメータ("TransitionParameter")の値以下になると、パス動作をし始めます。
|