
ID : 2967
デバイス制御
ロボットコントローラのデバイス制御は、下図に示す状態遷移により実行され、Controlword(J1)-(J8)(Index:0x6040,0x6840,0x7080,0x7880,0x8080,0x8880,0x9080,0x9880)によって、状態が制御されます。
ロボットコントローラのデバイス状態はStatusword(J1)-(J8) (Index:0x6041,0x6841,0x7081,0x7881,0x8081,0x8881,0x9081,0x9881)を使用してモニタすることができます。

- 白い四角で囲われた文字は状態を示します。
- STWはStatusword (J1)-(J8) (Index:0x6041,0x6841,0x7081,0x7881,0x8081,0x8881,0x9081,0x9881)を示します。Statusword (J1)-(J8)はすべて同じ値です。軸有効無効設定が無効な軸は0固定です。
- 下線部はControlword(J1)-(J8) (Index:0x6040,0x6840,0x7080,0x7880,0x8080,0x8880,0x9080,0x9880)の制御コマンドです。軸有効無効設定が有効な軸のうち、最低1つの軸の制御コマンドの変化により全軸の状態が遷移します。 (それぞれの軸のControlwordの論理積により全軸の状態が遷移)
- 複数の軸でControlwordが異なる場合は数字の若い軸を優先します。 例:Controlword(J1)とControlword(J2)が異なる場合はControlword(J1)を優先します。
Controlwordのビット(ステートマシン制御コード)
| ビット | 状態 | 説明 |
|---|---|---|
| 0 | Switch on | 下記の<ビット0~3、7>の詳細を参照してください |
| 1 | Enable voltage | |
| 2 | Quick stop | |
| 3 | Enable operation | |
| 4 | - | 予約 |
| 5~6 | Cycle counter | 下記の「ビット5,6」の詳細を参照してください |
| 7 | Fault reset | 0→1:エラーリセット 下記の「ビット4~9の詳細」を参照してください |
| 8~15 | - | 予約 |
ビット0~3、7の詳細
| コマンド | Controlwordのビット | ||||
|---|---|---|---|---|---|
| ビット7 | ビット3 | ビット2 | ビット1 | ビット0 | |
| Shutdown | 0 | X | X | 1 | 0 |
| Switch on | 0 | 0 | X | 1 | 1 |
| Switch on + Enable operation | 0 | 1 | X | 1 | 1 |
| Disable voltage | 0 | X | X | 0 | X |
| Disable operation | 0 | 0 | X | 1 | 1 |
| Enable operation | 0 | 1 | X | 1 | 1 |
| Fault reset | 0→1 | X | X | X | X |
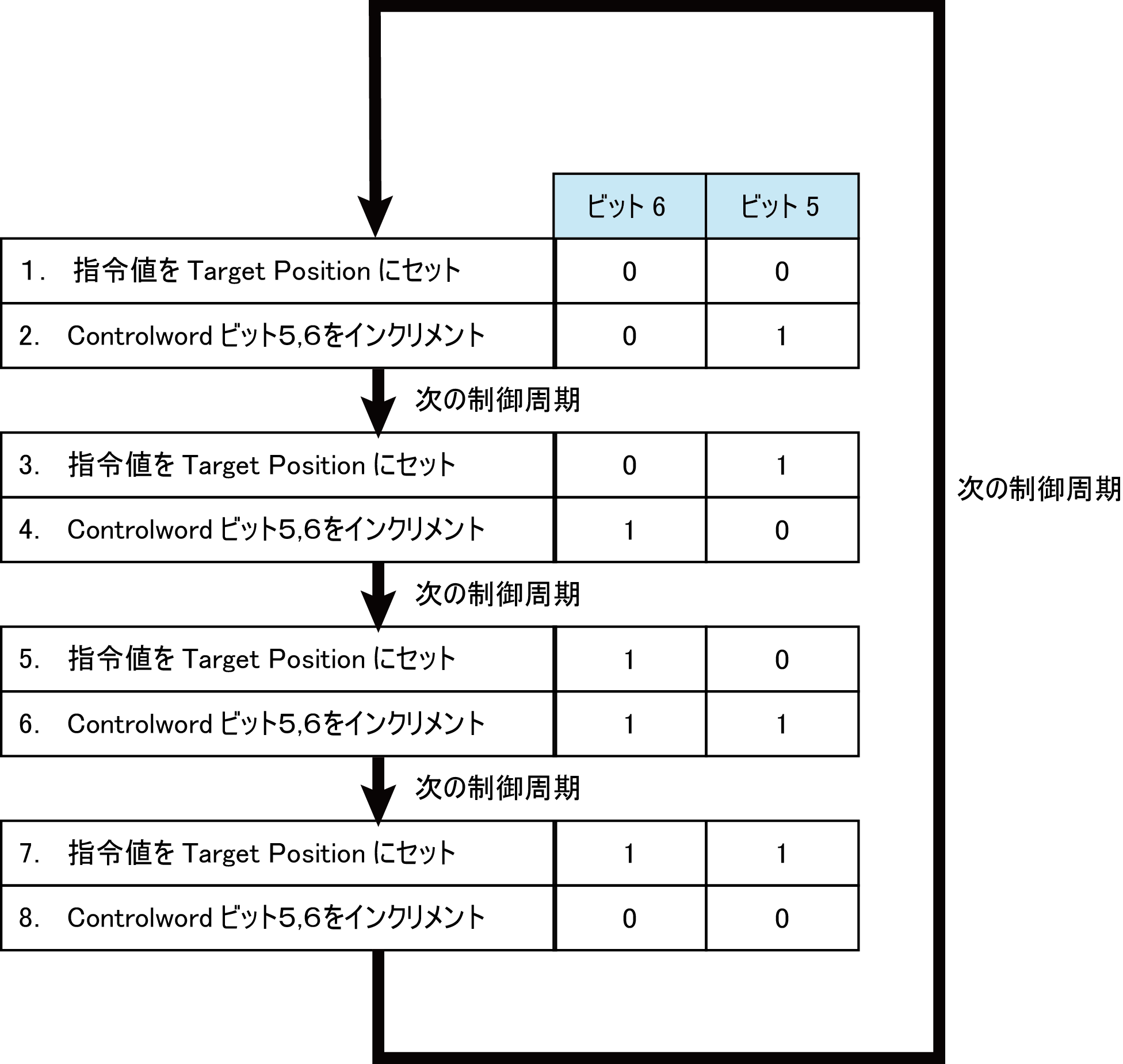
ビット5、6の詳細
SlaveMotion同期オプションを通知有効に設定することで、ビット5、6のCycle counterに下記数字の遷移を行うことでスレーブとなるロボットコントローラ内部での指令値補間を行う事ができます。
軌道生成するEtherCAT Master機能を持ったコントローラで指令値を更新する度に、Cycle counterの値をインクリメントしてください。 250us,500usで通信を行う場合はこの処理が必須となります。
Statuswordのビット
| ビット | 状態 | 説明 |
|---|---|---|
| 0 | Ready to switched on | 下記の<ビット0~7>の詳細を参照してください |
| 1 | Switched on | |
| 2 | Operation enabled | |
| 3 | Fault | |
| 4 | Voltage enabled | |
| 5 | Quick stop | |
| 6 | Switch on disabled | |
| 7 | Warning | |
| 8 | - | 予約 |
| 9 | Remote | Controlwordが処理されます |
| 10,11 | - | 予約 |
| 12 | Drive follows the command value | 0:指令値が無効 1:指令値が有効 |
| 13,14 | - | 予約 |
| 15 | Critical error | 0:レベル5エラー未発生 1:レベル5エラー発生 |
ビット0~7の詳細
| ビット | ビット | ビット | ビット | ビット | ビット | ビット | ビット | ドライブの状態 |
|---|---|---|---|---|---|---|---|---|
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | |
| X | 0 | X | X | 0 | 0 | 0 | 0 | Not ready to switch on |
| X | 1 | 1 | X | 0 | 0 | 0 | 0 | Switch on disabled |
| X | 0 | 1 | X | 0 | 0 | 0 | 1 | Ready to switch on |
| X | 0 | 1 | X | 0 | 0 | 1 | 1 | Switch on |
| X | 0 | 1 | X | 0 | 1 | 1 | 1 | Operation enabled |
| X | 0 | X | X | 1 | 1 | 1 | 1 | Fault reaction active |
| X | 0 | X | X | 1 | 0 | 0 | 0 | Fault |
| X | X | X | 1 | X | X | X | X | Main power on |
ロボットコントローラ内でレベル5エラーが発生した場合(Statuswordのビット15が1)、EtherCATマスタとなる外部機器からエラークリアはできません。ティーチングペンダントを接続またはWINCAPSIIIのモニタ機能でエラー内容を確認し、エラーの原因となる問題を解決してください。
ID : 2967