
ID : 2952
EtherCATマスターボード(外部軸)の装着
EtherCATマスターボード(外部軸)の装着は、ロボットコントローラの拡張スロットに内蔵します。拡張スロットは2つあり、そのうちPCIボード用コネクタに装着します。装着方法は「増設ボードの取り付け」を参照ください。
- ボード装着後電源を投入すると、ティーチングペンダントに「新規デバイスのドライバインストールが完了しました。"OK"を押してシャットダウンしてください。」を表示します。"OK"を押すとロボットコントローラがシャットダウンし、「It is now safe to turn off your computer.」と表示されたら電源を再投入します。
- 安全のため、および機器の故障防止のため、ケーブルを抜いたり、接続する前に、コントローラの電源ケーブルを抜くか、設備側からコントローラへの給電を遮断してください。
PCIeスロットにフィールバス用途のボード(EtherNet/IP Adapterボード、EtherACTスレーブボード等)を増設することは可能です。ただし、EtherCATマスターボード(外部軸)の装着のロータリスイッチを0以外に変更してください。
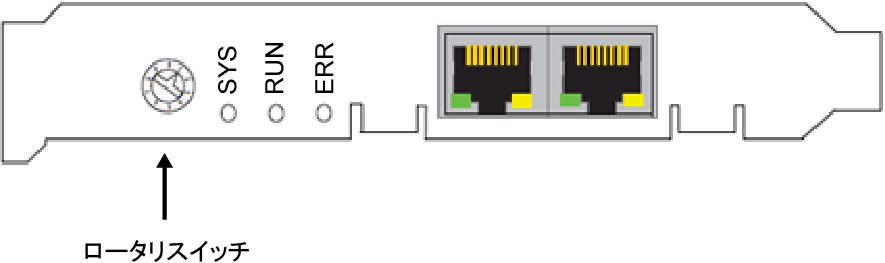
また下記方法でパラメータをロータリースイッチで設定した値に変更してください。
EtherCATMasterボードID
| EtherCAT MasterボードID | 設定範囲 | デフォルト |
|---|---|---|
| 値 | 0~9 | 1 |
ティーチングペンダントで変更する場合
1
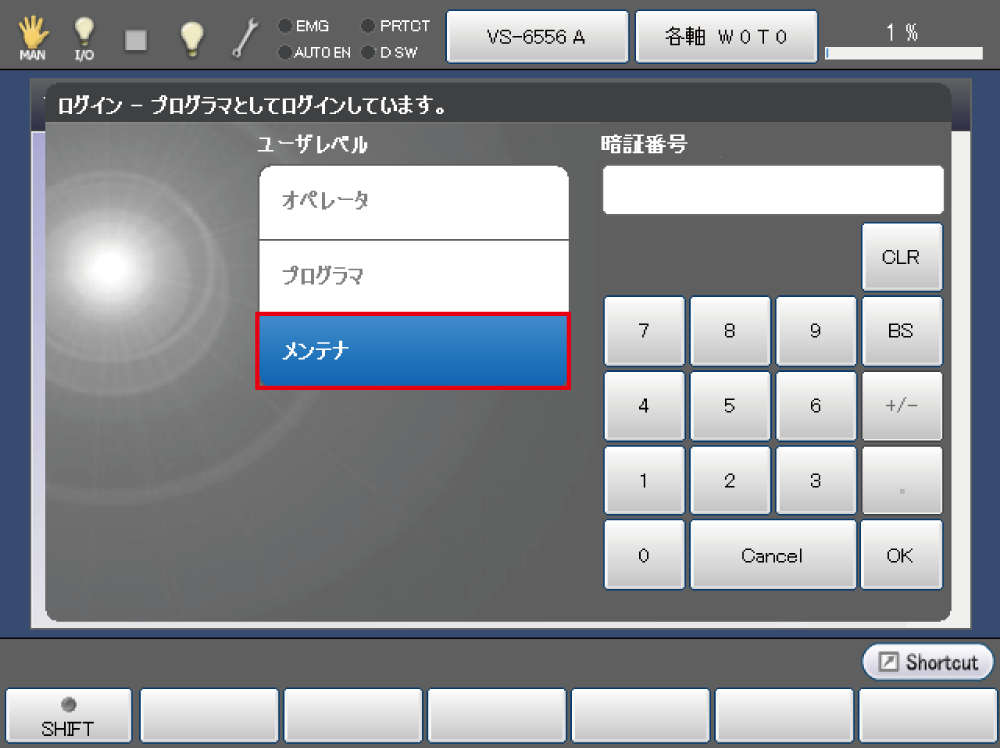
基本画面 - [F6 設定] - [F1 ログイン]
ユーザレベル「メンテナ」でログイン
2
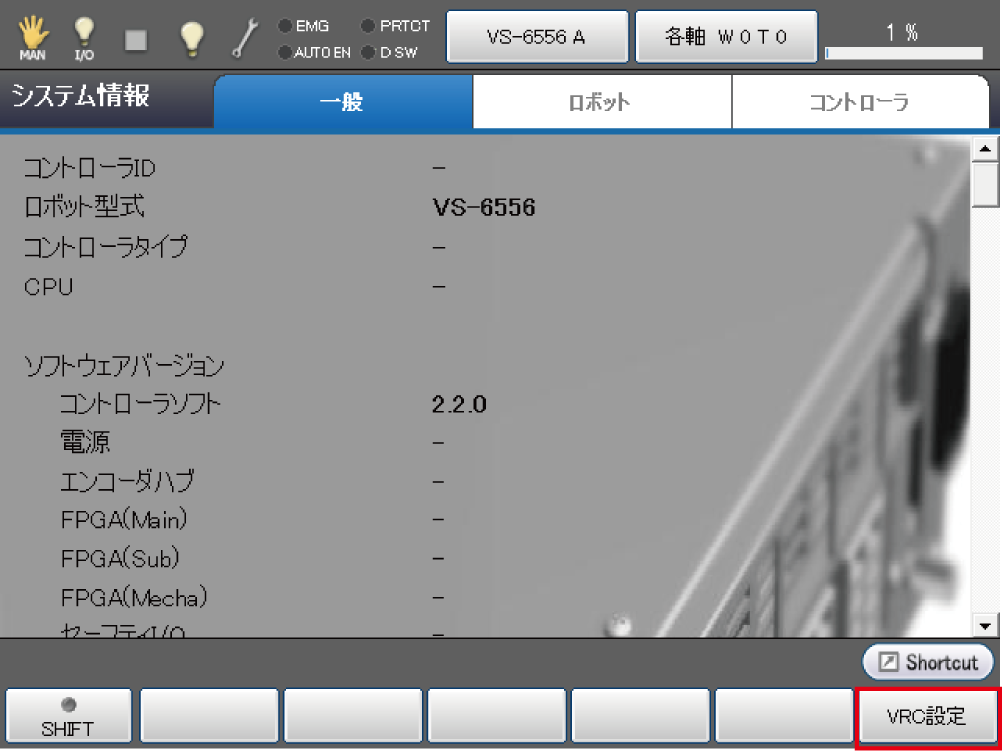
基本画面 - [F6 設定] - [F2 システム情報] - [F6 VRC設定]
3
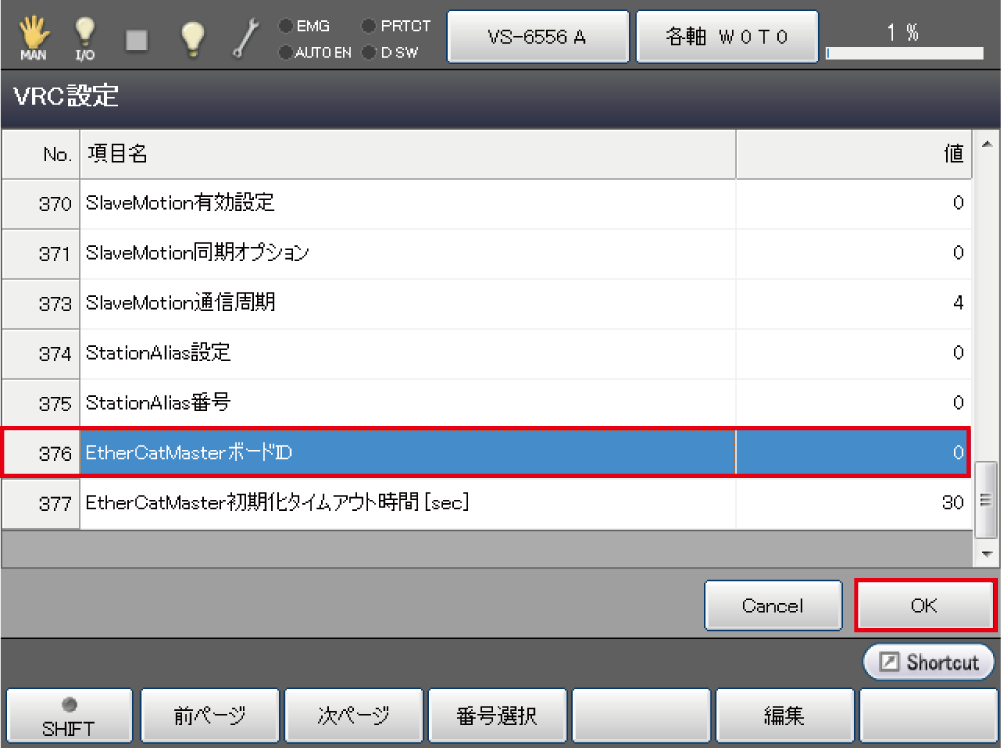
「376:EtherCATMasterボードID」にロータリスイッチで設定した値を入力
4
ロボットコントローラを再起動
WINCAPSIIIで変更する場合
1
ユーザレベル「1-プログラマ」でログイン
2
[プロジェクト(P)] - [パラメータ(T)]
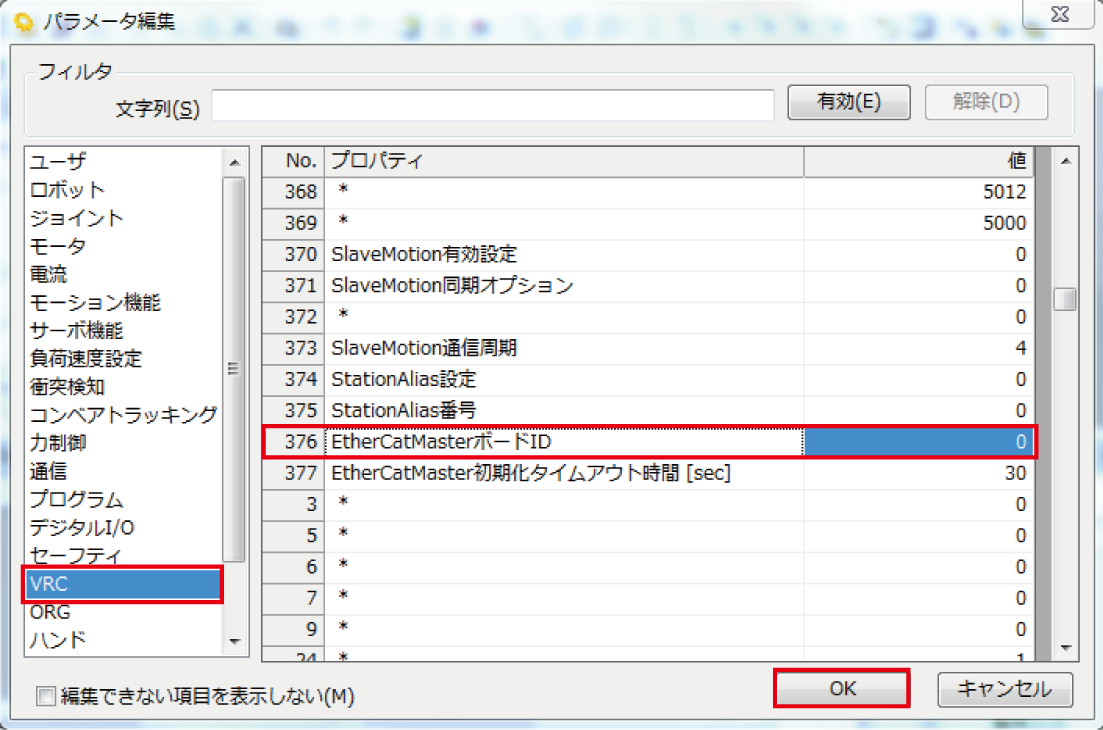
3
[VRC] - 「376:EtherCATMasterボードID」にロータリスイッチで設定した値を入力
4
ロボットコントローラに送信後、再起動
ID : 2952