
ID : 2874
キャリブレーション
概要
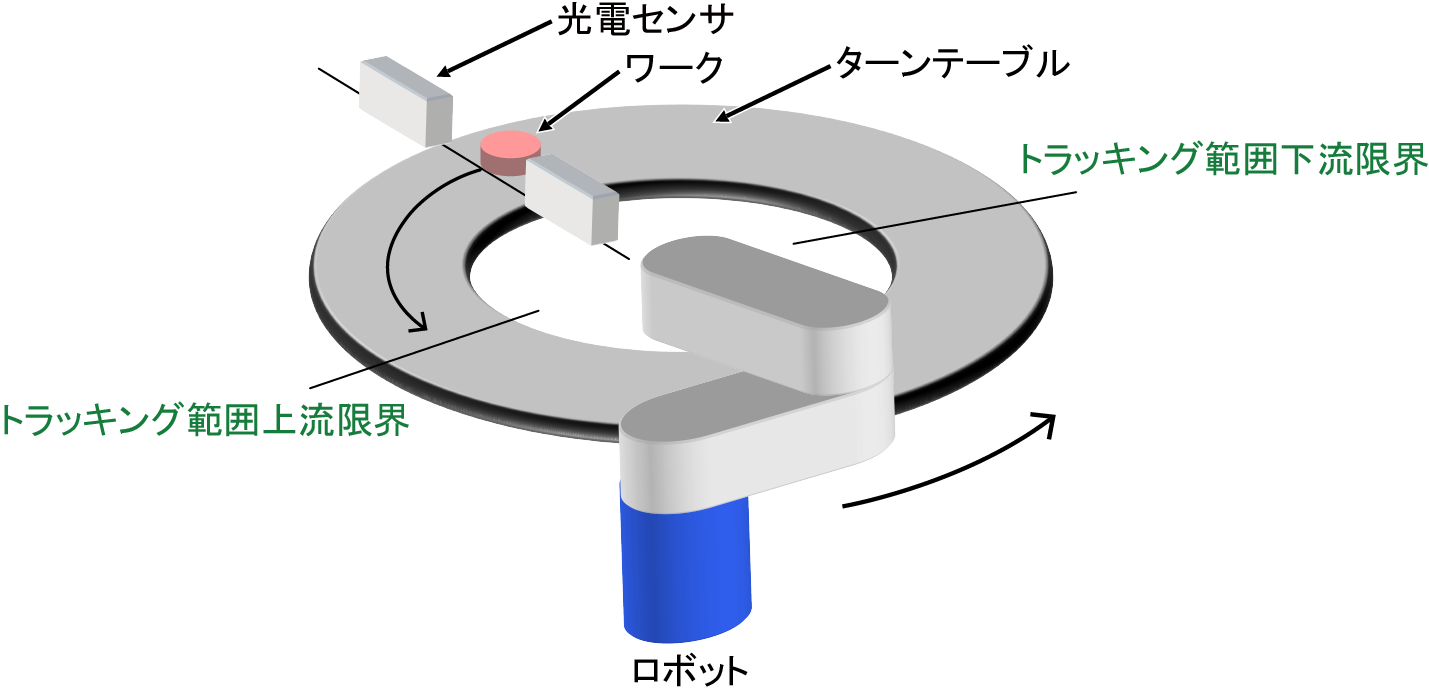
ターンテーブル、センサ、ロボットに関して、それぞれの正確な位置関係を計測します。
キャリブレーション結果は、以下に示すパラメータとして保存され、トラッキング動作を行う際に使用されます。
キャリブレーションはターンテーブル毎に実施してください。
ロボットとターンテーブルの位置関係に関するパラメータ
| パラメータの名称 | 内容 |
|---|---|
| コンベアCALDATA値X, Y | ターンテーブルの回転軸方向を示すベース座標Z軸回りの回転角度[rad] |
| コンベアCALDATA値Z | ターンテーブルの回転軸方向を示すベース座標XY平面から見た傾き[rad] |
| コンベア送り量 | エンコーダ1回転あたりのターンテーブルの進み量[deg/rev] |
| エンコーダ回転方向 | ターンテーブルを上流から下流に送った際のエンコーダの回転方向(1:正転、-1:逆転) |
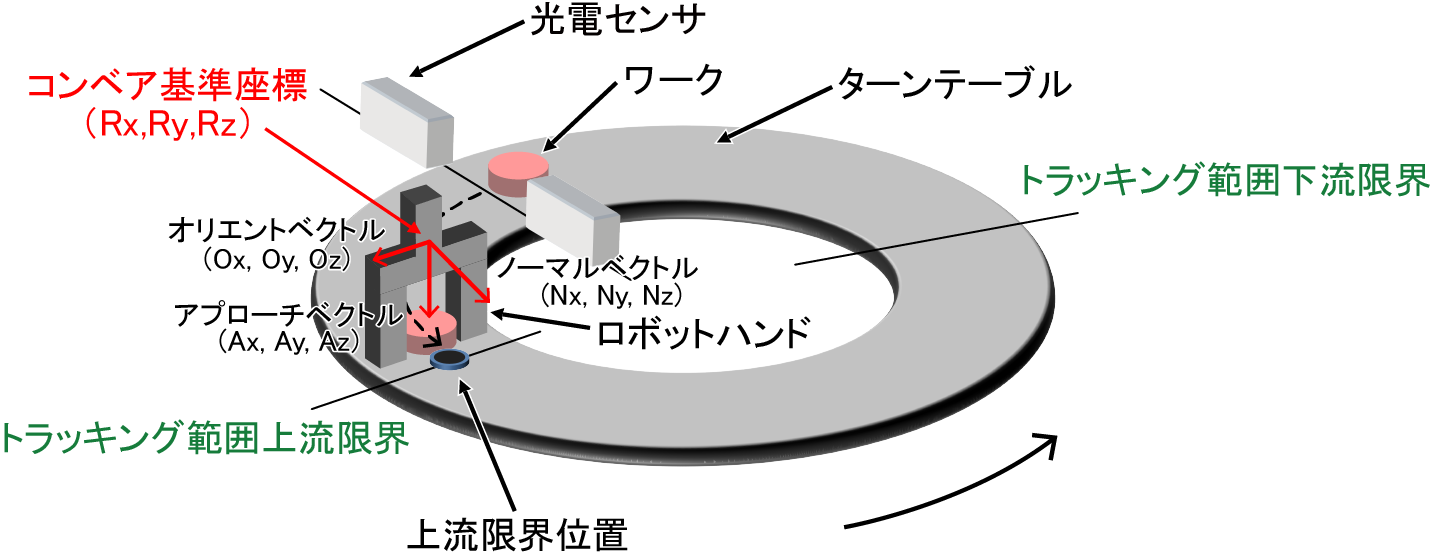
ロボットとセンサの位置関係に関するパラメータ
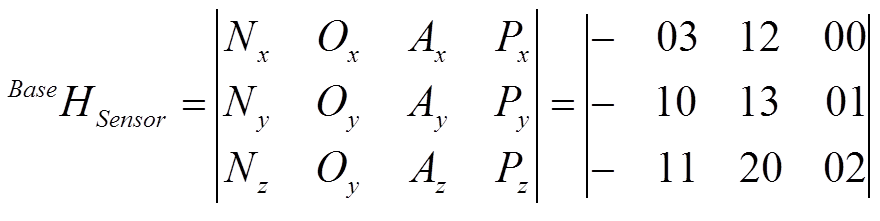
センサ検出位置を同時変換行列とワーク把持基本姿勢が保存されます。
| パラメータの名称 | 内容 |
|---|---|
| CALDATA値(00) | 同次変換型ワーク把持基本姿勢のNx |
| CALDATA値(01) | 同次変換型ワーク把持基本姿勢のOx |
| CALDATA値(02) | 同次変換型ワーク把持基本姿勢のAx |
| CALDATA値(03) | センサ検出位置X[mm] |
| CALDATA値(10) | 同次変換型ワーク把持基本姿勢のNy |
| CALDATA値(11) | 同次変換型ワーク把持基本姿勢のOy |
| CALDATA値(12) | 同次変換型ワーク把持基本姿勢のAy |
| CALDATA値(13) | センサ検出位置のY成分[mm] |
| CALDATA値(20) | 同次変換型ワーク把持基本姿勢のNz |
| CALDATA値(21) | 同次変換型ワーク把持基本姿勢のOz |
| CALDATA値(22) | 同次変換型ワーク把持基本姿勢のAz |
| CALDATA値(23) | センサ検出位置Z[mm] |
| パラメータの名称 | 内容 |
|---|---|
| コンベア基準座標RX | ワーク把持基本姿勢のRX[deg] |
| コンベア基準座標RY | ワーク把持基本姿勢のRY[deg] |
| コンベア基準座標RZ | ワーク把持基本姿勢のRZ[deg] |
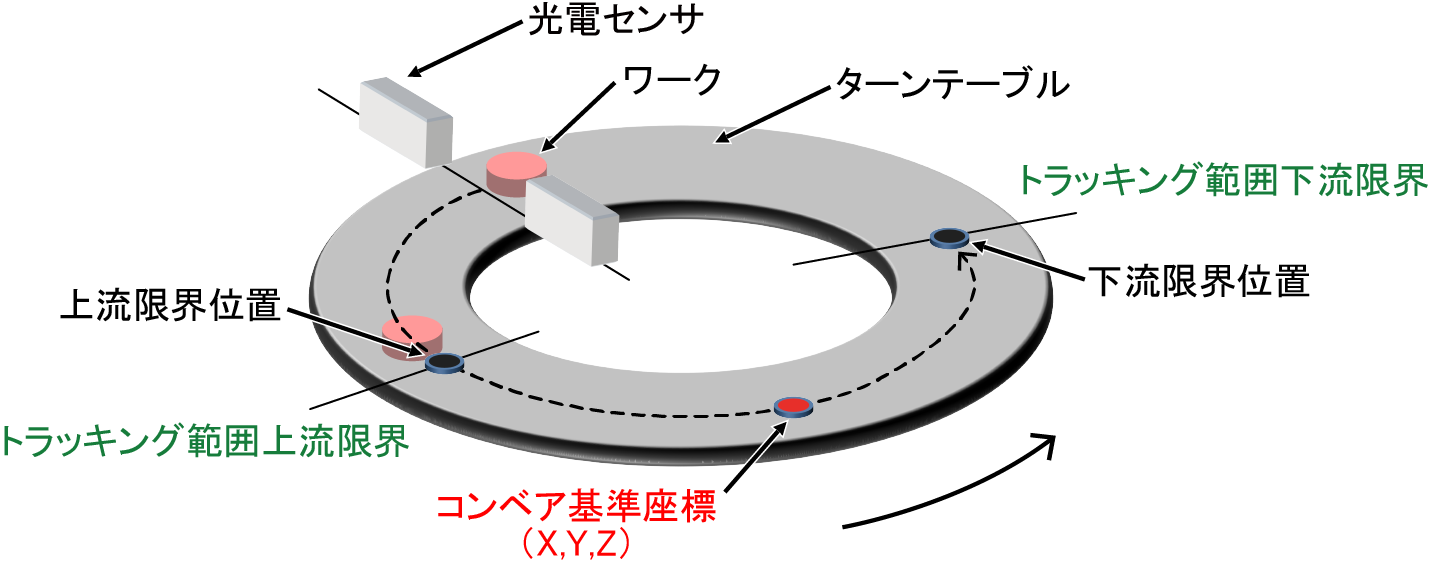
トラッキング範囲に関するパラメータ
| パラメータの名称 | 内容 |
|---|---|
| トラッキング範囲上流限界 | ロボットが追従動作を開始することのできる上流側の位置[mm] |
| トラッキング範囲下流限界 | ロボットが追従動作をやめ減速を開始する下流側の位置[mm] |
| パラメータの名称 | 内容 |
|---|---|
| コンベア基準座標X | 上流限界位置と下流限界位置の中点位置X[mm] |
| コンベア基準座標Y | 上流限界位置と下流限界位置の中点位置Y[mm] |
| コンベア基準座標Z | 上流限界位置と下流限界位置の中点位置Z[mm] |
ID : 2874
- このページに関連する情報
- キャリブレーション実施手順
- キャリブレーション結果の確認方法
- パラメータの設定