
ID : 2500
Safe Torque Off (STO)
機能
ロボット本体のモータ電源をOFFする機能です。
IEC60204-1の停止カテゴリ0に相当します。
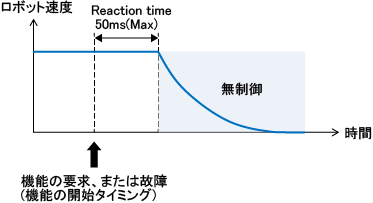
ロボットはフリーラン動作を開始します。ロボットが停止するための時間と距離は、システムの力学および運動エネルギーに依存します。
使用条件
| 入力信号 | なし |
|---|---|
| 出力信号 | STOモニタ出力 |
| 監視対象 | - |
| 監視範囲設定 | なし |
| Reaction time | 50ms(Max) |
| Process Safety Time (PST) | 100ms |
| 実行モード | 自動モード、手動モード |
| 機能の開始タイミング | 他の機能から起動されたとき開始 |
ID : 2500