
ID : 2495
既存機能への影響
使用できなくなる機能
以下の機能はセーフティモーションでは使用できません。
- 付加軸で使用できないもの
無限回転、ソフトウェアリミットチェックの無効化、自動PosClr、PosClrコマンド - ロボット軸で使用できないもの
ロボット軸無限回転、PosClrコマンド
エラー検出される可能性がある機能
以下の機能を使用するときは、SS2入力およびRSM*入力を使用しないでください。速度監視でエラー検出の可能性があります。
- コンベアトラッキング
- 電流制限機能(CurLmt)
- 力制御機能(ForceCtrl)
- サーボロック状態解除(SrvUnLock)
- Hシリーズ第3軸(Z)の電流制限機能(ZForce)
- bCap Slave機能
- 協調機能
- アーチモーション(ArchMove)
- 負荷推定機能
使用方法に制約が生じる機能
使用条件や軸設定などのロボットに関するパラメータを変更した場合
セーフティモーション機能では、監視に必要なデータの他に、使用条件などのロボットに関するパラメータも使用されます。ロボットに関するパラメータ (詳細は下記の"ロボットに関するパラメータ"を参照) は、ロボットコントローラの中では、通常のロボット制御用とセーフティモーション用とで格納場所が分かれています。ロボットに関するパラメータをティーチングペンダントやミニペンダントで変更した場合や、WINCAPSIIIで 変更してロボットコントローラに送信した場合は、通常のロボット制御用のパラメータは変更されますが、セーフティモーション用の格納場所には反映されません。セーフティモーション用の格納場所には、RC8Aセーフティパラメータツールで監視に必要なデータを送信することで、自動的にロボットに関するパラメータも送信されるようなっています。したがって、ロボットに関するパラメータを変更した場合は、RC8Aセーフティパラメータツールで監視に必要なデータを必ず送信し、ロボットコントローラを再起動してください。
なお、ティーチングペンダントまたはミニペンダントでロボットに関するパラメータを変更した場合は、WINCAPSIIIでロボットコントローラのデータをすべて読み出して保存した後、そのプロジェクトの監視に必要なデータを、RC8Aセーフティパラメータツールで送信し、ロボットコントローラを再起動してください。
ロボットに関するパラメータを変更した場合、上記方法でセーフティモーション用の格納場所にも変更を反映しないと、セーフティモーション機能が正しく機能しない恐れがあり危険です。必ずセーフティモーション用の格納場所にも変更を反映してください。
ロボットに関するパラメータ
ロボットに関するパラメータとは、具体的に下記の操作で変更するパラメータです。下記操作を行った場合は必ずセーフティモーション用の格納場所に変更を反映してください。
- ティーチングペンダント
-
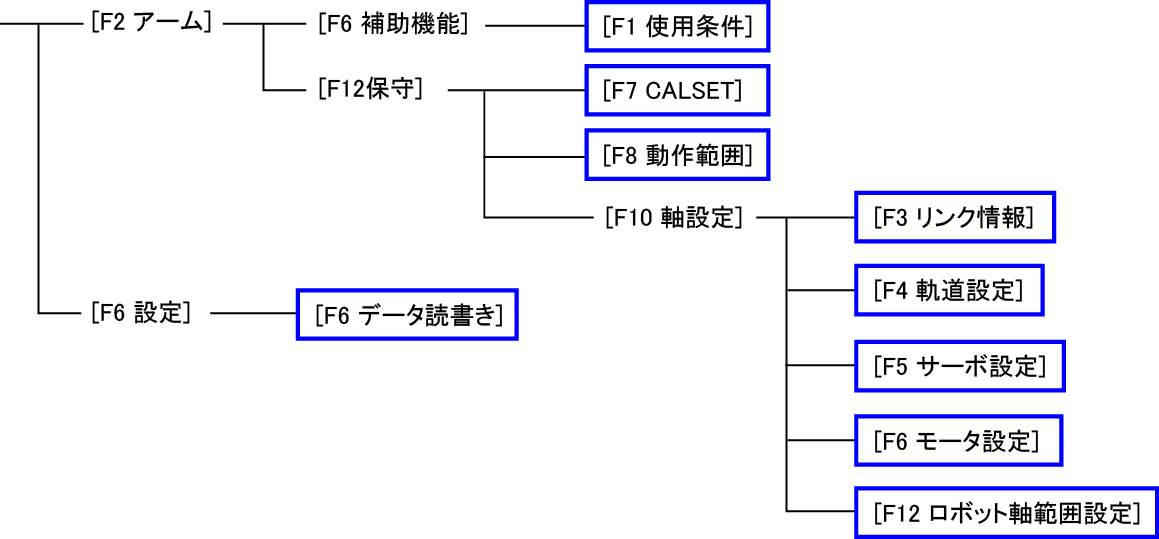
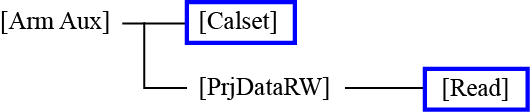
以下の四角で囲った操作で変更するパラメータがロボットに関するパラメータです。
- ミニペンダント
-
以下の四角で囲った操作で変更するパラメータがロボットに関するパラメータです。
- WINCAPSIII
-
以下の操作で変更するパラメータがロボットに関するパラメータです。
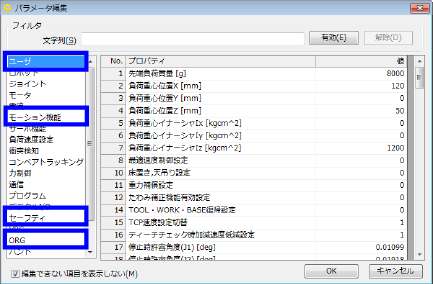
パラメータ 操作経路 : [プロジェクト(P)] - [パラメータ(T)]
該当パラメータ :
- ユーザ
- モーション機能
- セーフティ
- ORG
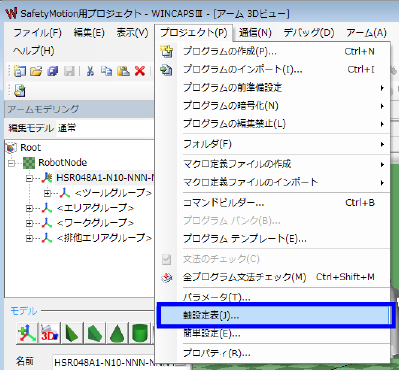
軸設定表 操作経路 : [プロジェクト(P)] - [軸設定表(J)]
ツール番号およびツール定義について
セーフティモーションのツール定義と、PACプログラムのツール定義を一致させてください。不一致だとセーフティモーションでエラーが起こる可能性があります。
PACの先頭でセーフティモーションのツール定義に変更する使い方を推奨します。
Sub Main
TakeArm Keep = 0
ChangeTool safetyinfo( 1 ) 'セーフティモーションが認識しているツール番号に変更
・
・ 'PACの先頭以外でtool,changetoolは使用しない。
・
End Subオートゲインチューニングおよび負荷推定機能について
監視機能を一時的に無効にして行ってください。
以下に手順を示します。
1
監視無効入力をONする。
2
オートゲインチューニング、または自動測定(負荷推定機能)を行う。
3
監視無効入力をOFFする。
協調機能について
セーフティモーション仕様専用の配線を行ってください。
ID : 2495