
ID : 2219
コンベアトラッキング
機能概要
コンベア上流に設置したセンサまたはカメラを使用して、コンベアで運ばれてくるワークの座標をあらかじめ取得し、ワークがロボットの稼動範囲内になったら、ワークの移動に合わせてアームを移動させながらピックアップする機能です。この機能はVer.1.6.*から使用可能です。
コンベアトラッキングには以下の2種類があります。
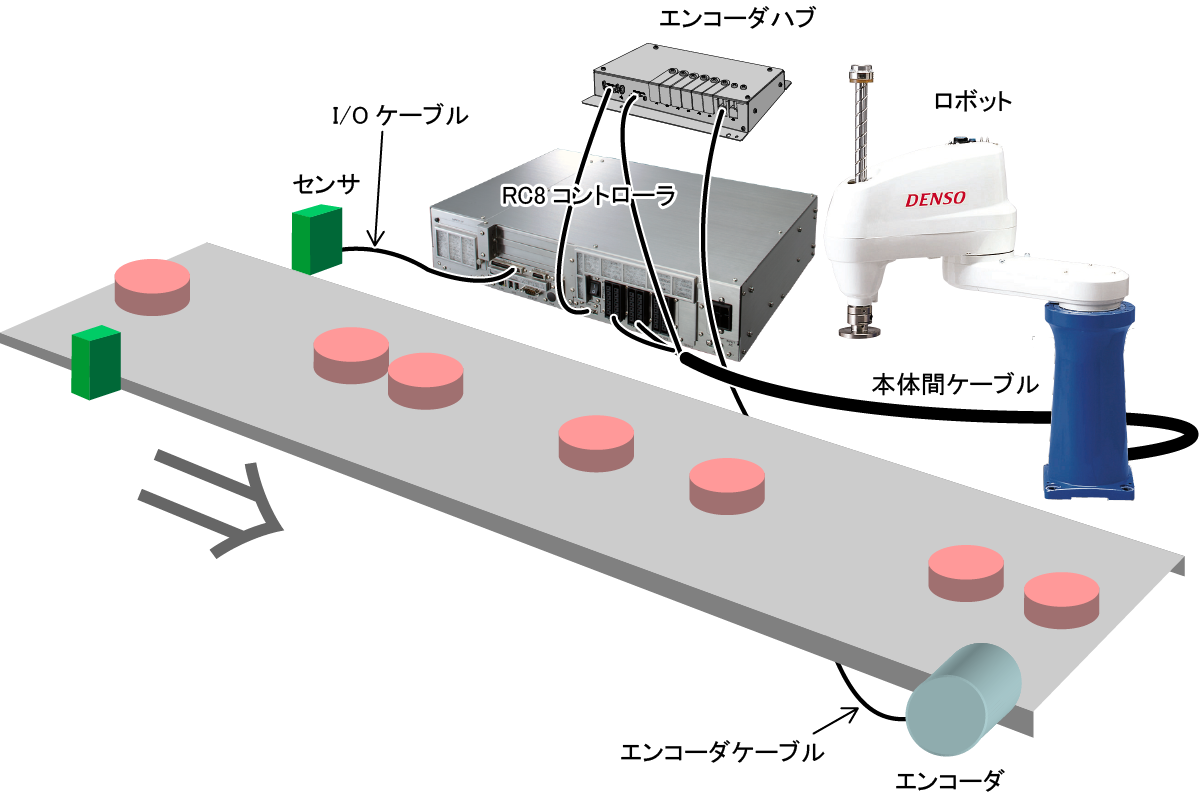
センサトラッキング
光電センサを使用してワークの座標を取得し、ピックアップする機能です。
任意の間隔で一直線に並んで運ばれてくるワークをピックアップする場合に使用します。
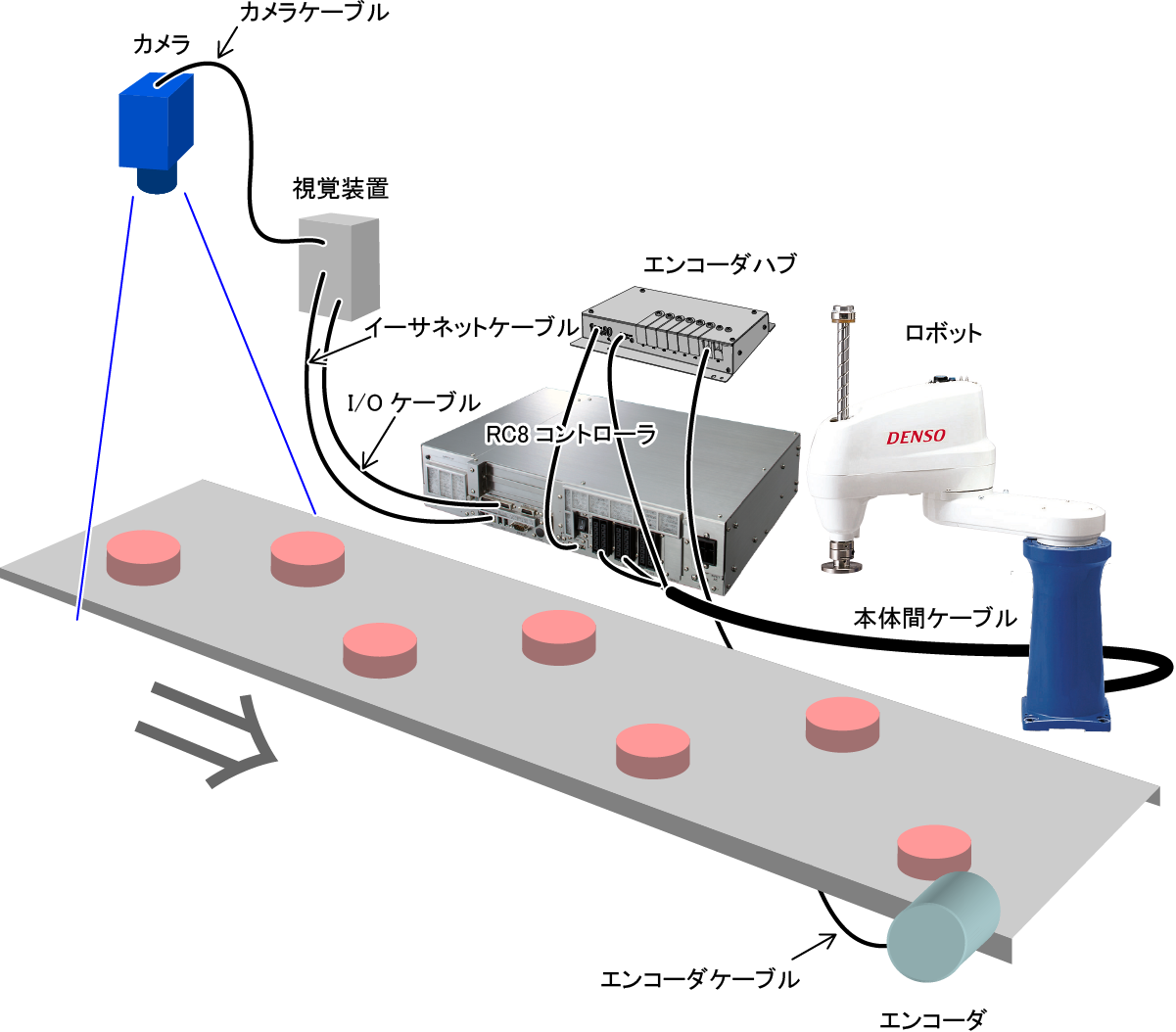
ビジョントラッキング
カメラ、視覚装置を使用してワークの座標を取得し、ピックアップする機能です。
任意の位置に置かれて運ばれてくるワークをピックアップする場合に使用します。
詳細内容
詳細については、「コンベアトラッキング取扱説明書」を参照してください。
ID : 2219