
ID : 2216
視覚機能
機能概要
カメラで読み取った画像データや、そこから取出したワークの位置や傾きの情報を、ロボットに与える機能です。画像データを元にワークの検査を行ったり、ワークの位置や傾きの情報をもとにロボットの移動先を計算したりします。
ワーク検査、コンベアトラッキング、ビンピッキングなどの用途に使用します。
下記のように、ロボットコントローラとは別に画像処理専用のコントローラを使用する「外部視覚」と、ロボットコントローラ内で画像処理を行う「内蔵視覚」があります。
視覚機能を利用するために、PacScriptの専用コマンドが用意されています。
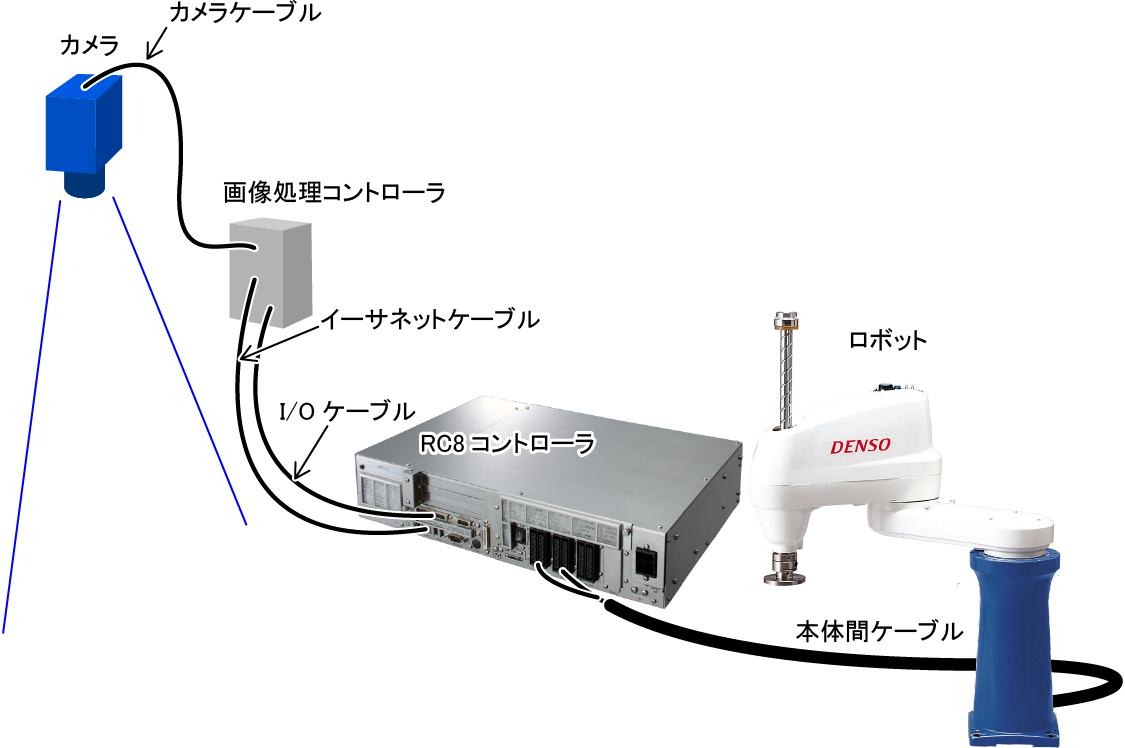
外部視覚の構成
カメラを画像処理コントローラに接続し、画像処理コントローラをロボットコントローラに接続します。
利用できる画像処理コントローラについては、「外部機能ガイド」を参照してください。
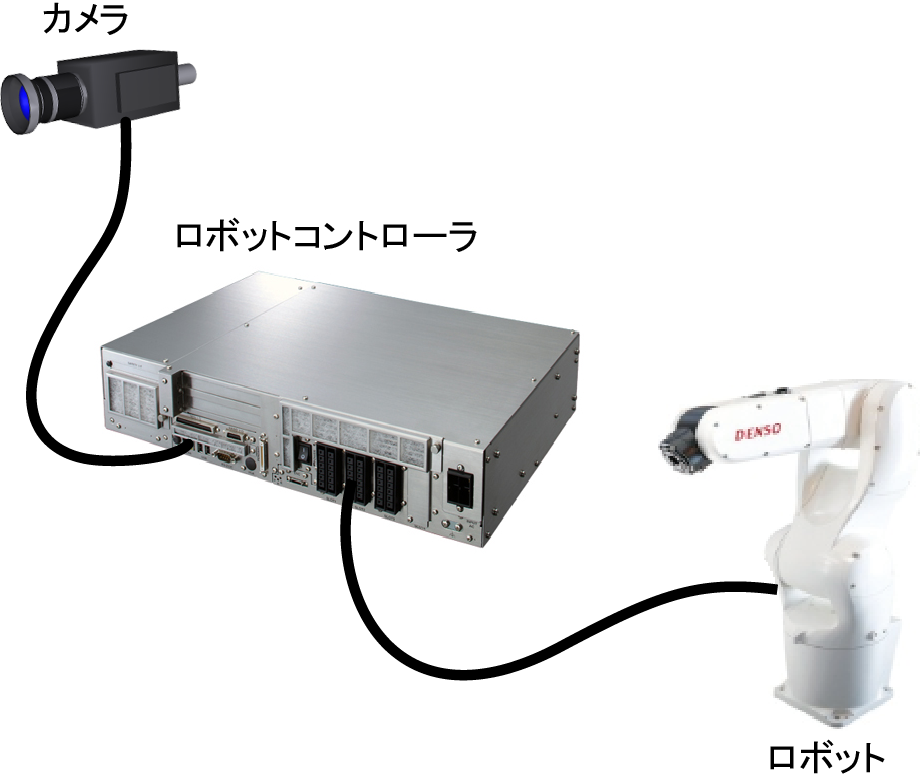
内蔵視覚の構成
カメラをロボットコントローラに直接接続します。この機能はVer.1.7.*から使用可能です。
使用できるカメラについては、「内蔵機能ガイド」を参照してください。
詳細内容
外部視覚については、「外部視覚ガイド」を参照してください。
内蔵視覚については、「内蔵視覚ガイド」を参照してください。
ID : 2216