
ID : 2155
WINCAPSIII、EMUの使用上の注意
協調制御・デュアルアームツール
協調用プロジェクトの構造
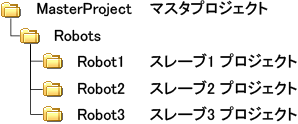
協調用プロジェクトは、図のようにマスタロボットのプロジェクト内にスレーブロボットのプロジェクトが含まれます。
Robots以下のフォルダ名は固定です。
協調用プロジェクトの作成
協調用プロジェクトは、原則コントローラから受信して作成してください。既存のプロジェクトから作成する場合は、IOタイプや変数内容が実機に一致したプロジェクトを選択してください。
協調用プロジェクトの送信
協調プロジェクトツールは、プロジェクト全体を一括して送信します。全データ(変数やプログラムおよびIOタイプ等パラメータ)が送信データで上書きされるためご注意ください。
個別データの送受信
プログラムや変数等、特定のデータのみ送受信する場合は、従来通りWINCAPSIIIを使用してください。
WINCAPSIII
スレーブロボットのプロジェクト
WINCAPSIIIを使ってスレーブロボットのプロジェクトを開く場合は、協調用プロジェクト内の“Robots¥Robot*” フォルダ以下のスレーブロボットプロジェクトファイル(wpj)を選択してください。
スレーブロボットの制限事項
スレーブロボットを選択した場合は、下記の機能が無効となります。
- [通信] - [接続状態] - [オインライン(モニタ/デバッグ)]機能
- [デバッグ] - [シミュレーションモード]機能
- アーム操作機能
スレーブロボットのモニタ
スレーブコントローラのモニタには、EMUをご使用ください。
EMU
スレーブロボットの追加
スレーブロボットに設定されたプロジェクトは、単体では追加できません。協調システムをシミュレーションする場合は、協調用プロジェクトのマスタロボットを追加してください。プロジェクト内に含まれるスレーブロボットも自動的に読み込まれます。
ロボット移動されたプロジェクト
WINCAPSIIIでロボット移動([アームモデリング画面] - [ロボットデータ移動])を行ったプロジェクトは、使用することができません。
IOリンク機能
IOリンク機能はスレーブロボットには対応していません。
ID : 2155