
ID : 2154
協調用プログラム作成の流れ
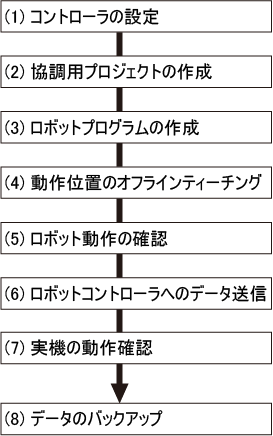
(1) コントローラの設定
協調機能ガイドのセットアップ手順に従いマスタ、スレーブコントローラをセットアップします。
(2) 協調用プロジェクトの作成
協調制御・デュアルアームツールを使って、(1)でセットアップしたコントローラからデータを受信して協調用プロジェクトを作成します。
既存のプロジェクトから作成する場合は、IOデバイスや変数の使用個数を実機に合わせた内容で作成してください。
(3) ロボットプログラムの作成
WINCAPSIIIで、協調用プロジェクトを開いて、マスタロボットの動作プログラムを作成します。
(4) 動作位置のオフラインティーチング
アーム操作や変数移動機能を使って、マスタロボットの動作位置をティーチングします。
(5) ロボット動作の確認
作成したプログラムの動きを、シミュレーションやデバッグ機能を使って確認します。
(6) ロボットコントローラへのデータ送信
協調制御・デュアルアームツールを使って、協調用プロジェクト全体をコントローラに送信します。
協調制御・デュアルアームツールは、プロジェクト全体を一括してコントローラに送信します。プログラムや変数といった特定のデータのみ送信する場合は、従来通りWINCAPSIIIを使用してください。
(7) 実機の動作確認
実機を使って動作位置のファインティーチングや周辺機器とのタイミング調整など、ロボットプログラムの最終確認を行います。
(8) データのバックアップ
協調制御・デュアルアームツールを使って、ロボットコントローラ内のデータを受信して、協調用プロジェクトをバックアップしておきます。
協調制御・デュアルアームツールは、プロジェクト全体を一括してコントローラから受信します。プログラムや変数といった特定のデータのみ受信する場合は、従来通リWINCAPSIIIを使用してください。
ID : 2154