
ID : 2008
複数ロボットの連続位置取り込み
複数ロボットの位置をそれぞれ指定した変数へ取り込む方法を説明します。
「位置取込」画面まではリーダロボットの位置取り込みのSTEP1~2と同じです。
3
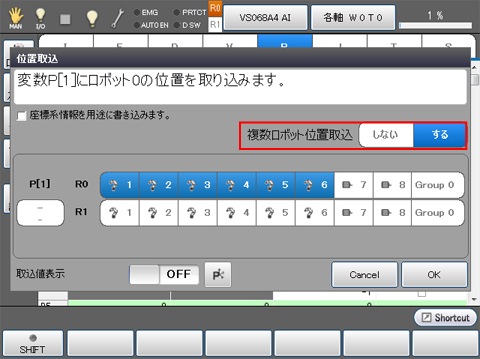
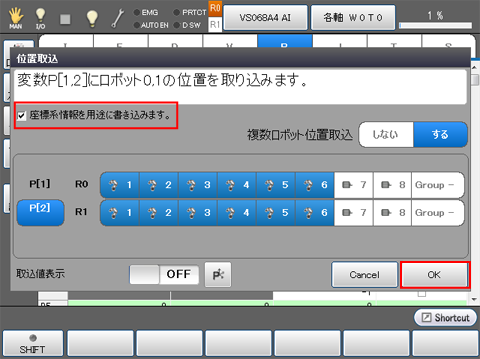
複数ロボット位置取込を"する"にします。
4
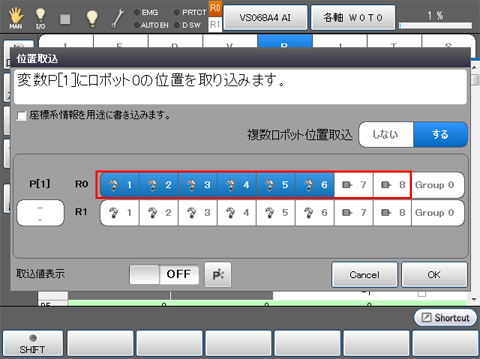
リーダロボットの取り込みする軸(ロボット軸、付加軸)を選択します。
5
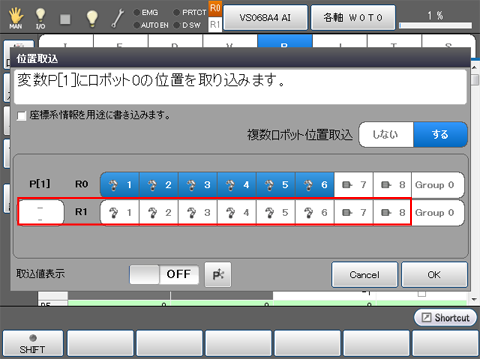
2台目のロボットの取り込みする軸(ロボット軸、付加軸)を選択、あるいは変数番号の空欄位置を押します。
6
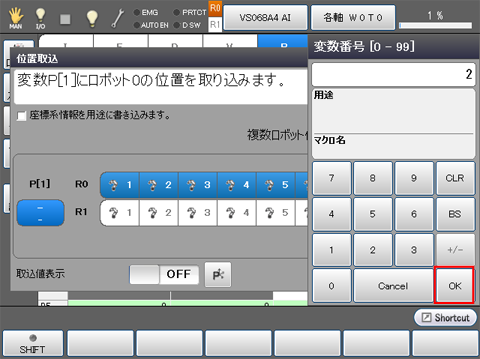
テンキーが表示されますので、変数番号を入力してOKを押します。
テンキーのデフォルトの変数番号は、リーダロボットの変数番号の次の番号もしくは前の番号になります。
7
用途欄に座標系情報(ロボット番号、ワーク番号、ツール番号)を書き込む場合は、「座標系情報を用途に書込みます」にチェックを入れます。
OKを押します。
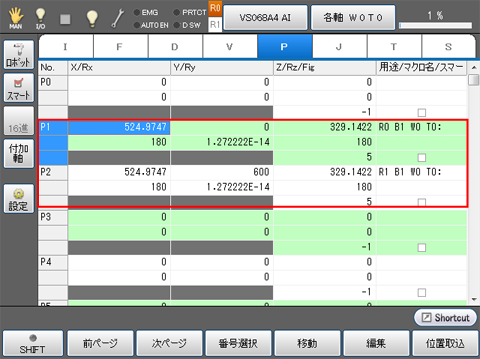
この例ではリーダロボットの位置が変数P1に、2台目のロボットの位置が変数P2に、それぞれ取り込まれています。
- STEP7で「座標系情報を用途に書込みます」にチェックを入れると用途欄に座標系情報(ロボット番号、ワーク番号、ツール番号)を書込まれます。既に用途欄に書き込みしてある場合は、座標系情報を上書きします。
- コントローラ再起動時、「座標系情報を用途に書き込みます。」のチェックは保持されます。(Ver.1.13.*以降)
- 座標系情報が書き込みしてある用途欄を選択し、[F5 編集]を押すと用途欄の内容をクリアします。
オプション機能
「位置取込」画面で「取込値表示」を"ON"にするとロボットの現在位置が表示されます。
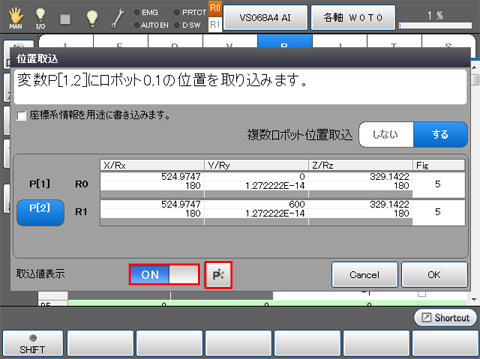
「取込値表示」が"ON"の状態で「P」ボタンを押すと「J」ボタンに切り替わり、付加軸の位置情報を表示します。「J」ボタンが表示されている時に「J」ボタンを押すと「P」ボタンに戻ります。
ID : 2008