
ID : 2005
手動による協調動作
手動で2台のロボットを協調動作します。
リーダロボットをY+方向へ移動する場合とリーダロボットをRx+方向へ移動する場合の協調動作例を以下に示します。
- あらかじめベース座標を設定しておく必要があります。ベース座標の設定方法は「ベース座標の設定」を参照してください。
- 協調動作は各軸動作モードでは使用できません
リーダロボットをY+方向へ移動する場合
リーダロボットをY+方向へ移動させます。ティーチングペンダントのデットマンスイッチを押しながら移動方向キーJ2/Yの+ボタンを押します。
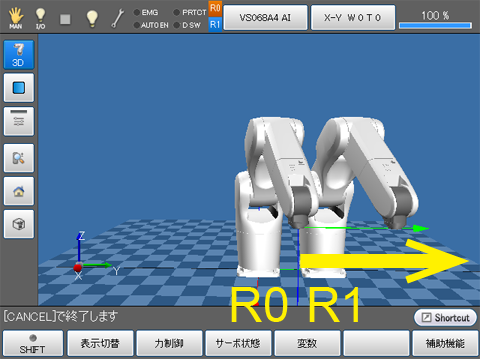
リーダロボットの動きに合わせてフォロワロボットが矢印の方向へ移動します。
リーダロボットをRx+方向へ移動する場合
リーダロボットをRx+方向へ移動させます。ティーチングペンダントのデットマンスイッチを押しながら移動方向キーJ4/RXの+ボタンを押します。
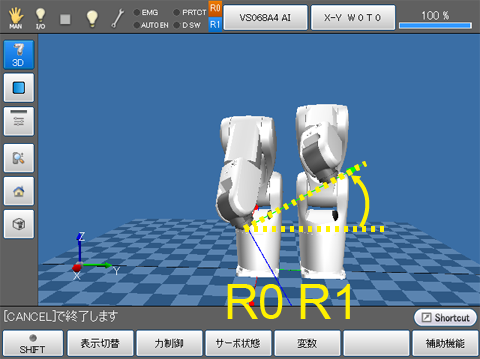
協調動作でフォロワロボットの回転中心はリーダロボットのツール座標原点になります。
この例ではリーダロボットのツール座標はTOOL0を選択しているため、フォロワロボットはリーダロボットのフランジを中心に回転しています。
ID : 2005