
ID : 2004
前準備
2台のロボットを協調機能の手動操作する前準備として、動作モードの変更、リーダとフォロワの設定をします。
動作モードの変更
動作モードを変更します。
協調機能の手動操作は動作モードが「X-Y」もしくは「TOOL」の場合に行えます。
1
「動作モード選択」ボタンを押します。
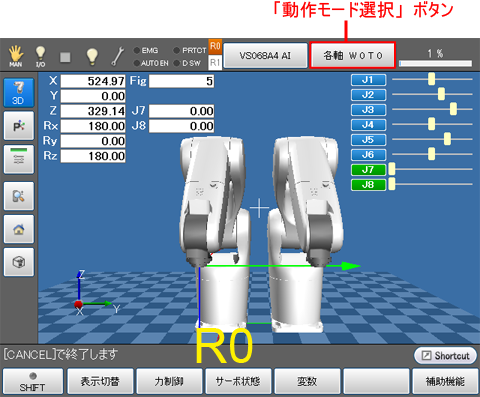
「動作モード選択(Robot*)」画面が表示されます。
2
動作モードを選択します。ここでは「X-Y」モードを選択します。
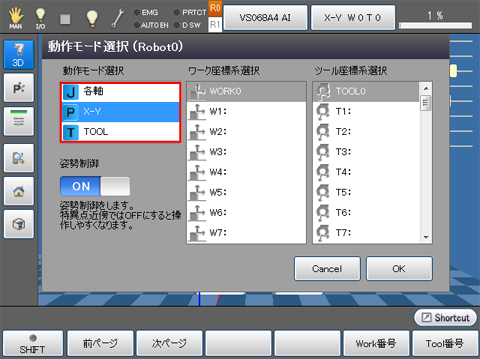
3
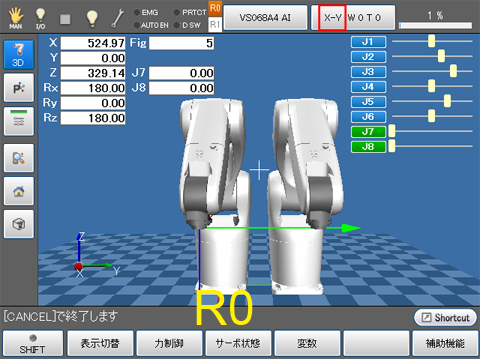
「OK」ボタンを押すと動作モードが変更されます。
ロボットの選択
リーダとフォロワを設定します。
ここではRobot0のアームをリーダ、Robot1のアームをフォロワに設定する例を示します。
リーダの「アーム」を選択している場合は、フォロワも「アーム」のみの選択となります。また、リーダの「付加軸」を選択している場合は、フォロワも「付加軸」のみの選択となります。
1
「ロボット選択」ボタンを押します。
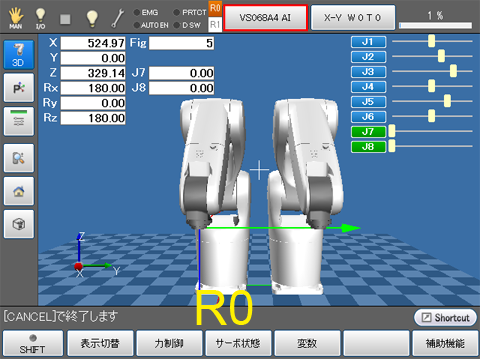
「ロボット選択」画面が表示されます。
2
リーダ欄のR0をタッチしてリーダにするロボットを選択します。
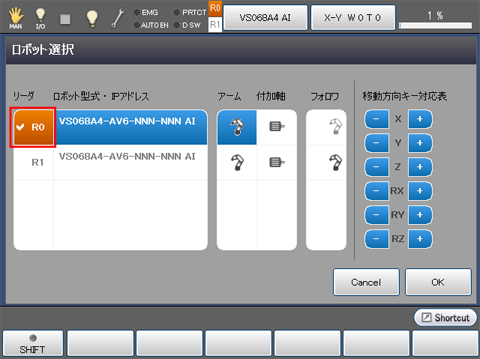
付加軸を選択する場合は、R0の付加軸欄をタッチします。
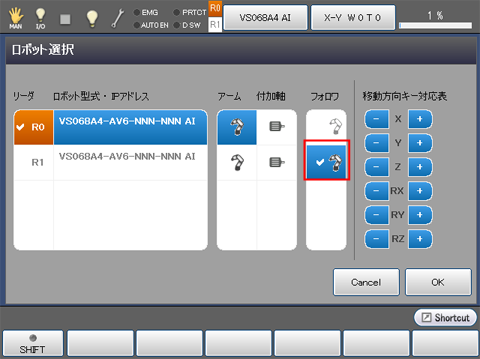
3
フォロワ欄のR1をタッチしてフォロワを選択します。
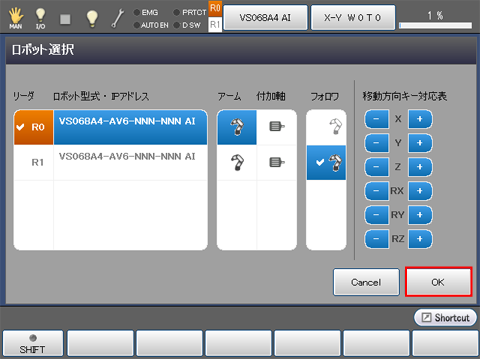
4
「OK」ボタンを押します。
設定した状態が表示されます。
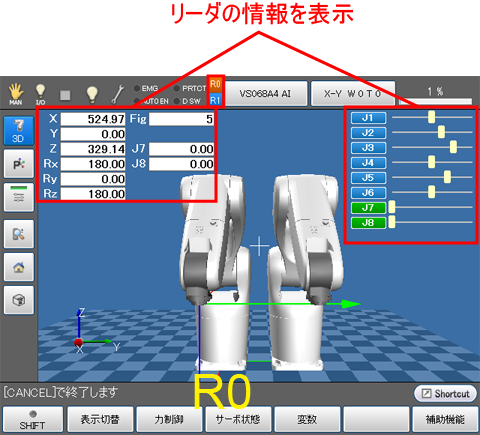
現在の設定状態は画面上部に表示されている「R0」、「R1」の色に反映されます。
・橙色:リーダ
・青色:フォロワ
・白色:選択なし
・橙色:リーダ
・青色:フォロワ
・白色:選択なし
ID : 2004