
ID : 1939
位置データ
位置データとは、ロボットのフランジ中心(ツール定義が有効なときはツール先端)の位置と、そのときのロボットの姿勢を表す7要素のベース座標系(ワーク座標系が有効なときはワーク座標系)のデータをいいます。
ロボットの現在位置や移動目標位置を表現する際に、ロボットの姿勢も含めて、この位置データを使います。
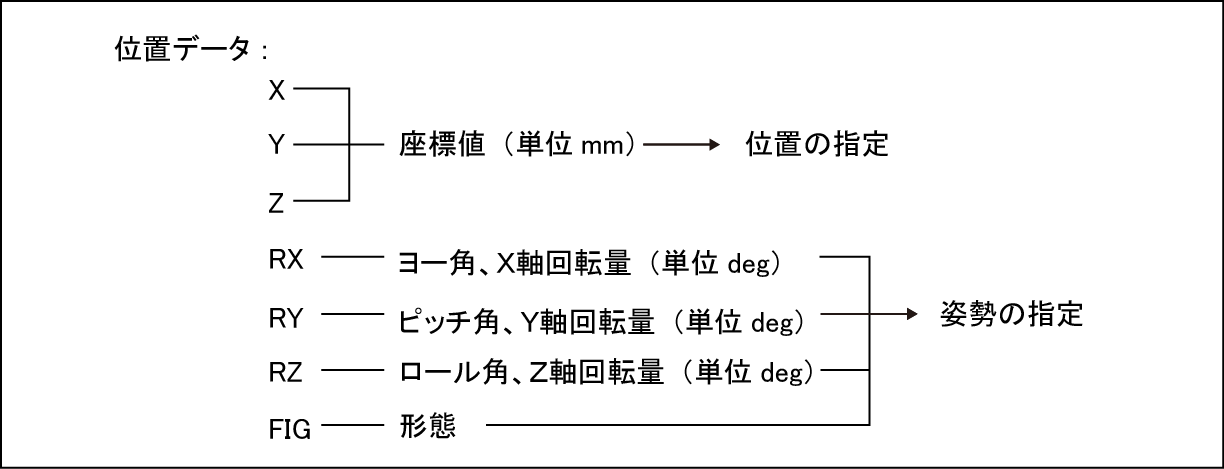
X、Y、Zで示される座標値とは、ロボットのフランジ中心(ツール定義が有効な時はツール先端)の位置をベース座標系(ワーク座標系が有効なときはワーク座標系)で示した値で、単位は[mm]です。
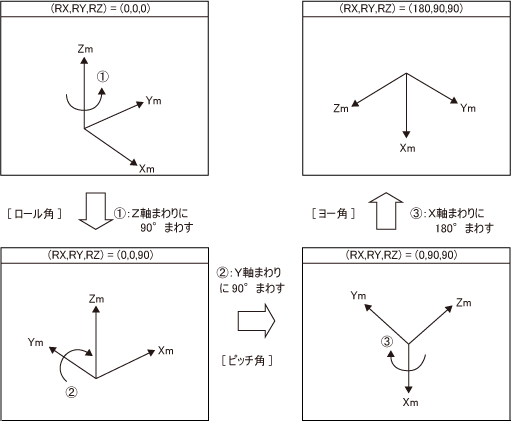
RX、RY、RZで示される、ヨー、ピッチ、ロール角は、フランジ中心を原点とする座標系(メカニカルインタフェース座標系)(ツール定義が有効なときはツール座標系)がなす、ベース座標系(ワーク座標系が有効なときはワーク座標系)のそれぞれの軸周りの回転角で、単位は[deg]です。ベース座標(ワーク座標)をRZ、RY、RXの順番で回転した場合、メカニカルインタフェース座標系(ツール座標系)の向きと一致します。回転角が同じでも回転する順番を変えると違った姿勢になるため、上記のように順番が決まっています。
FIGで示される形態とは、ロボットアームの関節がとる形態です。形態については、「腕・ひじ・手首の形態について」で説明します。形態を表す値を選んで指定することもできますが、自動的に最適な値を選択してくれる機能を使用すると、簡単に指定することができます。自動選択の機能については、機能ガイドの「最適Fig自動選択機能(Auto Fig)」を参照してください。
5軸ロボットでは、フランジが正確にXY平面と平行の場合のみ、フランジ姿勢(フランジの3次元的な向き)を一定に保った動作が可能です。それ以外では、フランジ姿勢は位置データと一致しない場合があります。
ロール、ピッチ、ヨー角の回転例
姿勢: (RX, RY, RZ) = (0, 0, 0) → (RX, RY, RZ) = (180, 90, 90)
ID : 1939