
ID : 1802
動作モード選択画面の表示・変更
操作経路:ティーチングペンダントの[M-MOD]キー
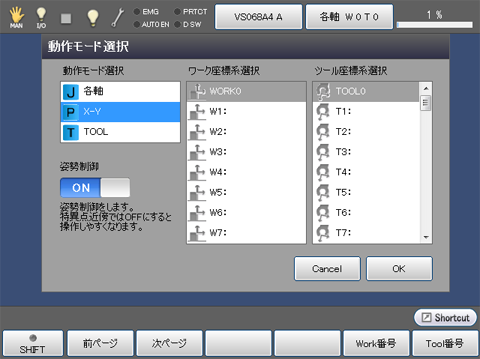
ティーチングペンダントの[M-MOD]キーを押すと、次のような[動作モード選択]ウィンドウが表示されます。
ティーチングペンダントの上下左右方向カーソルキー、もしくは、ジョグダイアルを使用して「動作モード」、「ワーク座標系」、「ツール座標系」のそれぞれ設定したい項目を選択します。画面に直接タッチしても選択できます。
選択後、[OK]を押すと、変更されます。
現在選択されている動作モードは、速度バーの左横に表示されます。
| ファンクションキー以外のキー | |
|---|---|
| [J] 各軸 | 各軸をそれぞれ別個に操作できます。 |
| [P] X-Y | ベース座標系およびワーク座標系を基準にして、ロボットを動かすことができます。 |
| [T] TOOL | ツール座標系を基準にして、ロボットを動かすことができます。 |
| 姿勢制御 |
ロボット動作中に姿勢制御をするか、しないかを指定します。 |
| 使用可能なファンクションキー | |
|---|---|
| [F1 前ページ] | 現在選択されている箇所の直前のページが表示されます。 |
| [F2 次ページ] | 現在選択されている箇所の直後のページが表示されます。 |
| [F5 Work番号] |
ワーク座標系番号の選択ができます。 テンキーを使用して使用するワーク座標系番号を入力し、[OK]を押すと、番号が選択されます。 |
| [F6 Tool番号] | テンキーを使用して使用するツール座標系番号を入力し、[OK]を押すと、番号が選択されます。 |
- 「姿勢制御」は6軸ロボット専用機能です。6軸ロボット以外ではボタンは表示されません。
-
「姿勢制御」は通常ONになっています。
動作モード選択で[P] X-Y、[T] TOOL選択時のみボタンが表示され、ON/OFFの選択ができます。
ID : 1802
- このページに関連する情報
- 姿勢制御OFF時の動作