
ID : 1530
X-Yモード(6軸ロボットの場合)
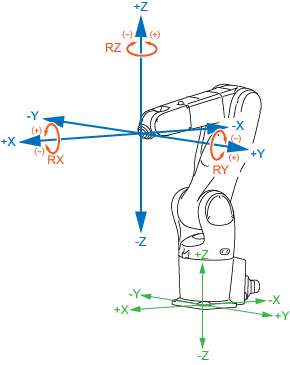
X-Yモードでは、ロボットアームをベース座標系(原点がロボット基部の中心に設定されている)を基準にして動かすことができます。X-Yモードで[X]キー、[Y]キー、または[Z]キーを操作すると、以下に示すように、ロボットフランジがそれぞれX軸、Y軸、またはZ軸に沿って直線動作します。
ワーク座標(原点が対象物の直方体包絡面の角に設定されている)を設定した場合は、ワーク座標系を基準にして直線動作します。
X-Yモードで[RX]キー、[RY]キー、または[RZ]キーを操作すると、以下に示すように、フランジ面中心の位置は変化させずに、ロボットアームがフランジ面中心に仮想的に設定したワーク座標系の各軸のまわりを回転動作します。
|
|
5軸ロボットでは、フランジが正確にロボットXY平面と平行(RX、RYが0度)の場合のみ、フランジ姿勢(フランジの3次元的な向き)を一定に保てます。それ以外では、フランジ姿勢は同一になりません。
ID : 1530