
ID : 1744
簡単教示によるワーク座標の設定
操作経路:[F2 アーム] - [F6 補助機能] - [F4 ワーク] - [F4 簡単教示]
ロボットを3点ティーチングして、位置座標(P型変数)に登録し、その登録した位置座標のデータを用いてワーク座標の設定を行います。
[F4 簡単教示]を押すと、次のような[3点教示によるワーク座標系の設定]ウィンドウが表示されます。
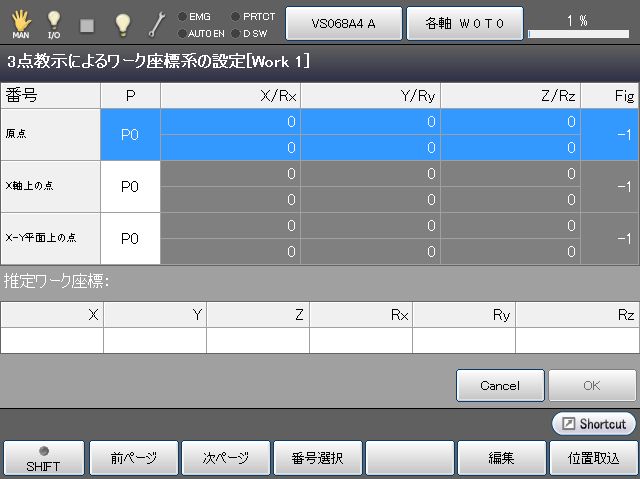
各点については、下表を参照してください。
| X軸上の点 | X軸上のX>0の任意の点を指定します。 |
|---|---|
| X-Y平面上の点 | X-Y平面上のY>0(第1象限、第2象限)の任意の点を指定します。 Y<0の点を指定すると、Y軸、Z軸の方向が意図しない向きになる可能性があります。 また、Y=0の点を指定した場合は、計算不能で計算結果は出力されません。 |
P型変数の登録がすべて終了し、「推定ワーク座標」の値が確定後、[OK]を押すと、ワーク座標の1番に結果の座標が反映されます。
「推定ワーク座標」が計算できない場合、[OK]が押せません。
4軸ロボットの場合は、Rx、Ryは無視されます。
| 使用可能なファンクションキー | |
|---|---|
| [F1 前ページ] | 現在表示されている登録点番号の直前のページに移動します。 |
| [F2 次ページ] | 現在表示されている登録点番号の直後のページに移動します。 |
| [F3 番号選択] |
テンキーが表示されます。 |
| [F5 編集] |
テンキーが表示されます。 |
| [F6 位置取込] |
位置座標(P型変数)に現在位置を取り込みます。 |
ID : 1744