
ID : 1716
非常停止
非常停止を押すと、実行中の全プログラムが瞬時に中断されて、ロボットが停止します。この場合モータパワーは切れます。
操作方法
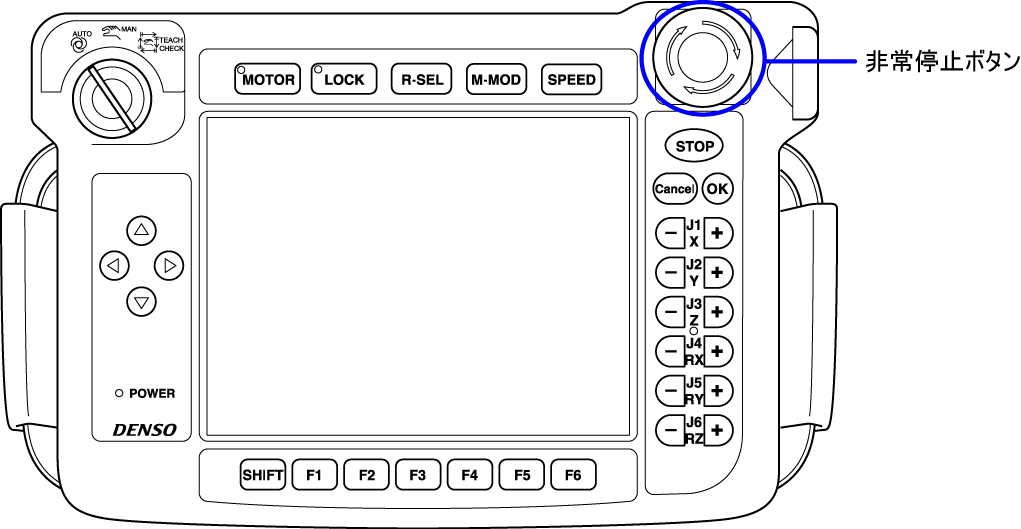
ティーチングペンダントの[非常停止]ボタンを押します。
非常停止後、そのまま再起動操作を行うと、選択されたプログラムの先頭から実行されます。
再起動は、モータをONし、「ステップ起動」「サイクル起動」「連続起動」のいずれかによります。
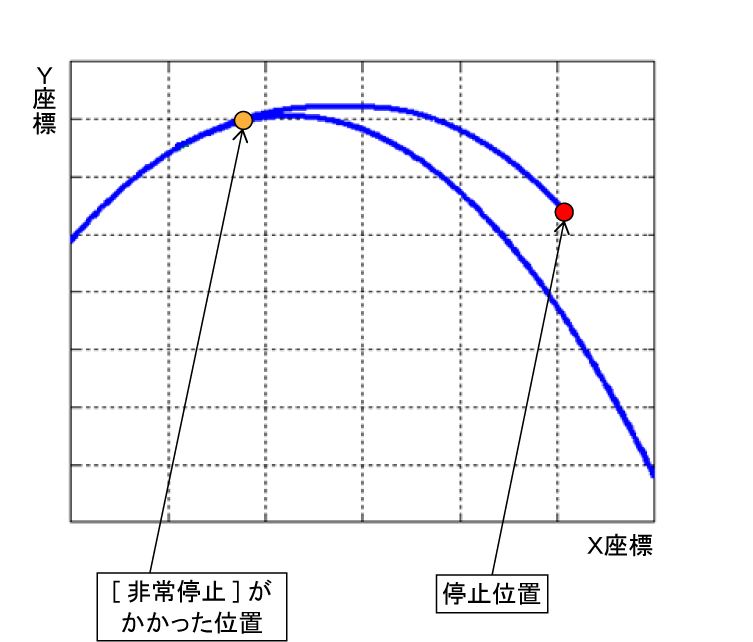
- 非常停止ではモータ電源を切りにしますが、惰性で不意にロボットが動くことがあります。
- 非常停止後にロボットを再起動する場合は、衝突や事故などの危険がないことをあらかじめ確認しておいてください。非常停止後、そのまま再起動操作を行うと、選択されたプログラムの先頭から実行されます。
停止処理の方法
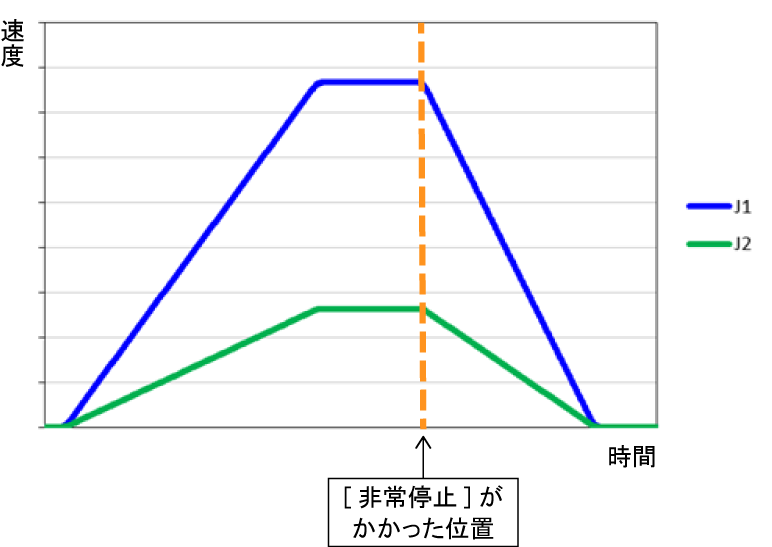
Ver.2.1.*以降
全軸が同期して、同時に停止します。予定していた軌道上に停止します。
- 速度
- 軌道
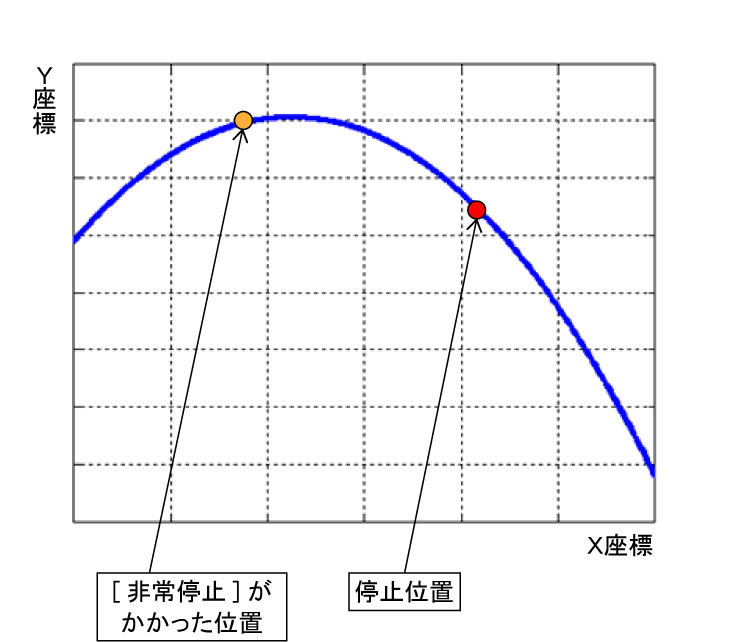
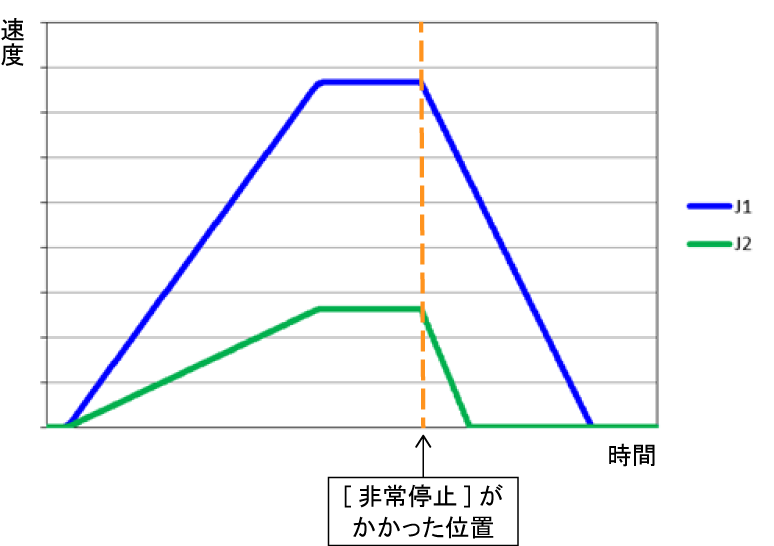
Ver.2.0.*以前
各軸毎に最大減速で停止します。
- 速度
- 軌道
Ver.2.1.*以降の場合、VRCパラメータ「48:非常停止時のロボットの停止処理」を「0:各軸の最大減速で停止」に切替えることで、Ver.2.0.*以前の停止方法に戻すことができます。この操作を行うには、ユーザレベルを「メンテナ」に指定してください。
パラメータ変更後はコントローラの再起動を行ってください。
ID : 1716