
ID : 1615
PTP制御
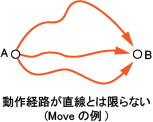
PTP(Point to Point)とは、点から点への移動を意味します。移動する経路はロボットの姿勢に依存し、直線運動をするとは限りません。
下図にPTP制御による動作例を示します。
動作制御コマンドで補間方法を指定するときに、「P」の指定をするとPTP動作を行ないます。
PTP動作目標位置にP型、T型変数を指定した場合、ロボット形態を指定すると、指定したロボット形態となるよう移動します。
ロボットの形態の値に特別な値を入れることで、自動的に最適なロボット形態を選択する機能があります。詳細は「最適Fig自動選択機能(Auto Fig)」を参照してください。
ID : 1615