
ID : 1526
速度、加速度、減速度の設定
ロボットの速度は、内部速度と外部速度で設定できます。
内部速度とは、プログラムの中でコマンドによって設定する速度のことです。
外部速度とは、ティーチングや試運転等のためにティーチングペンダントまたはミニペンダントを使って設定する速度のことで、その単位は最高速度(内部速度)に対する割合(%)で表します。
速度設定時の注意点
- 電源投入時の外部速度の初期値は1%です。
- 一度外部速度を設定すると、コントローラの電源を切るか、設定を更新するまで有効です。
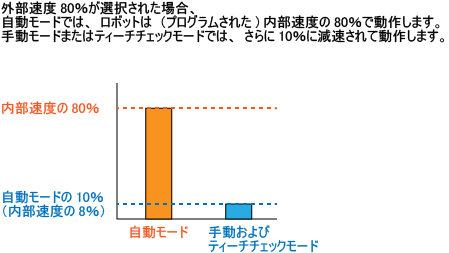
- 自動モードでは実際のロボットは[内部速度×外部速度(%)]で動作します。たとえば外部速度に80%を設定すると、内部速度×80%でロボットは動作します。
手動モード、ティーチチェックモードでは内部速度の10%の速度で動作するようになっています。たとえば外部速度に80%を設定すると、10%×80%、すなわち8%で動作します。実際の動作速度の例を下図に示します。 - 速度を設定すると加速度・減速度は自動的に下式で計算され入力されます。
加速度(%)= ((速度) /100)2 × 100
減速度(%)= ((速度) /100)2 × 100
(計算例) 速度を20%とすると、
加速度(減速度) = (20/100)2 × 100 = 4%
自動算出されたこれらの値はティーチングペンダントまたはミニペンダントを使って修正することもできます。そのときは、最新の修正値が有効になります。
 |
ID : 1526