
ID : 1498
動作関連パラメータ
プログラム最高速度
ポイントデータ内の最高速度を設定します。 入力範囲:20~100(%) 初期値 :100
装置の調整時にポイントデータの変更をせず、全ポイントデータの移動速度を下げたい場合などに有効なパラメータです。 •
把持速度
加減速絶対位置(加減速相対位置)移動・把持動作時の把持有効範囲内での速度を設定します。
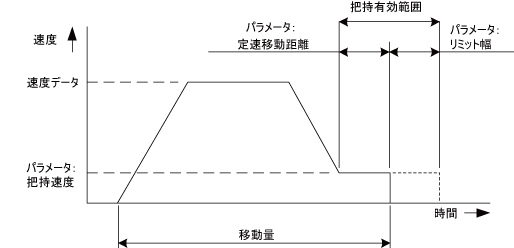
入力範囲:20~100(%) 初期値 :20(%)
注)把持速度が最高速度より大きな値に設定した場合、最高速度は把持速度となります 。
定速移動距離
加減速絶対位置(相対位置)移動・把持動作時の定速移動時の距離を設定します。 目標位置より定速移動距離分だけ手前から把持速度になります。
入力範囲:0.01~99.99(0.01mm単位) 初期値 :2 (mm)
リミット幅
加減速絶対位置(相対位置)移動・把持動作時の定速移動時のリミット幅を設定し ます。 目標位置よりリミット幅分だけ、把持速度にて移動します。 把持有効範囲を越えた場合、移動量+リミット幅で停止し、HOLD信号がOFFした状 態で、INPOS信号がONします。
入力範囲:0.01~99.99(0.01mm単位) 初期値 :アクチュエータタイプにより異る
注)定速移動距離内にいても把持動作は行います。
リミット幅内にいる時に加減速絶対位置移動・把持動作を行うと、最終位置に動作するのみで把持動作は行いません。防止するにはリミット幅を最小値にしてください。
+ソフトリミット
プラス側の可動範囲を設定します。 入力範囲:0~999.9(0.1mm単位) 初期値 :アクチュエータタイプにより異なります。 原点復帰方向を開側へ設定した場合、閉側が+方向となります。 原点復帰方向を閉側へ設定した場合、開側が+方向となります。 ポイントデータ設定後、動作指令入力時ソフトリミット範囲外へ移動するのを防ぎ ます。 ソフトリミット範囲外のポイントデータ指定にて動作指令した場合、ロボットコントローラはエラー停止します。
-ソフトリミット
マイナス側の可動範囲を設定します。 入力範囲:-999.9~0(0.1mm単位) 初期値 :アクチュエータタイプにより異なります。 原点復帰方向を開側へ設定した場合、閉側が+方向となります。 原点復帰方向を閉側へ設定した場合、開側が+方向となります。 ポイントデータ設定後、動作指令入力時ソフトリミット範囲外へ移動するのを防ぎます。ソフトリミット範囲外のポイントデータ指定にて動作指令した場合、 ロボットコントローラコントローラはエラー停止します。
ストローク
アクチュエータのストロークを設定します。 初期値 :アクチュエータタイプにより異なります。 入力範囲:0~999.9(0.1mm単位) 初期値は、アクチュエータタイプにより異なります。
位置決め完了距離
指定したポイントへ移動する際に、指定した距離の手前で移動完了のINPOS信号がONします。 システムのタクトタイムを上げたい時にパラメータの値を大きくします。 入力範囲:0.01~655.35 (0.01mm単位) 初期値 :アクチュエータタイプにより異なります。
ID : 1498