
ID : 1037
運転準備スタート(入力)
機能
- この入力をON(短絡)すると、入力条件と動作の入力信号(1),(2)を検出して、ロボットは自動立ち上げ動作を行ないます。ただし、この信号入力は、専用出力「ロボット電源入り完了」がONしている状態で行なってください。
- 「ロボット異常クリア」をON(短絡)し、この入力をON(短絡)すると、ロボット異常が発生した場合、異常を解除します。
入力条件と動作
運転準備スタートの入力に先だって、以下の(1)~(3)の入力を0N(短絡)してください。
なお、CAL実行(入力)は互換のために存在しますが、RC8シリーズではCALが必要なロボットはないため、ON/OFFしても状態は変化しません。
(1)モータ電源入り(入力)
この信号をON(短絡)したまま、運転準備スタートをON(短絡)すると、モータ電源をONします。ただし、自動モードになっていないと使えません。
(2)SP100(入力)
この信号をON(短絡)したまま、運転準備スタートをON(短絡)するとSP100%が設定されます。
(3)プログラムリセット(入力)
この信号をON(短絡)したまま、運転準備スタートをON(短絡)すると、停止中の全プログラムを初期化します。
(1)~(3)をすべてON(短絡)したまま、運転準備スタートをON(短絡)すると、(1)~(3)を順次実行します。
(1)~(3)はティーチングペンダント・ミニペンダントで、一部実行しても有効になります。
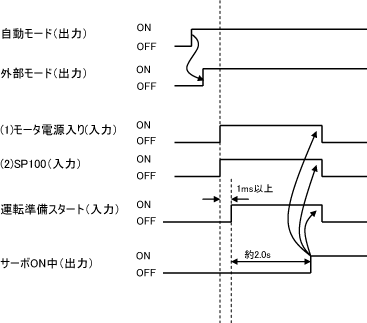
運転準備スタートおよび(1),(2)の入力タイミングは下図を参照してください。
運転準備スタートと(1),(2)は、サーボON中(出力)のONを受けて、OFF(立ち下げ)します。
ロボット立ち上げ時は全項目を実行させますが、稼働中の一時停止からの復帰のときは、復帰時間短縮のため必要な項目のみ実行してください。
状態図
 |
ID : 1037