
ID : 52
非常停止時、モータOFFで各軸を動かすには
VS-***シリーズロボットは全軸にブレーキがついています。非常停止時、モータOFFで各軸を動かすにはブレーキを解除します。ブレーキ解除するには以下の2つの方法のいずれかを行います。
UL仕様の場合は、ティーチングペンダントまたはミニペンダントによるブレーキ解除はできません。
標準仕様の場合
ティーチングペンダントまたはミニペンダントでブレーキ解除します。
操作方法は、ティーチングペンダント操作ガイド「アーム保守機能の表示・設定」またはミニペンダント操作ガイド「ブレーキ解除とロック」を参照してください。
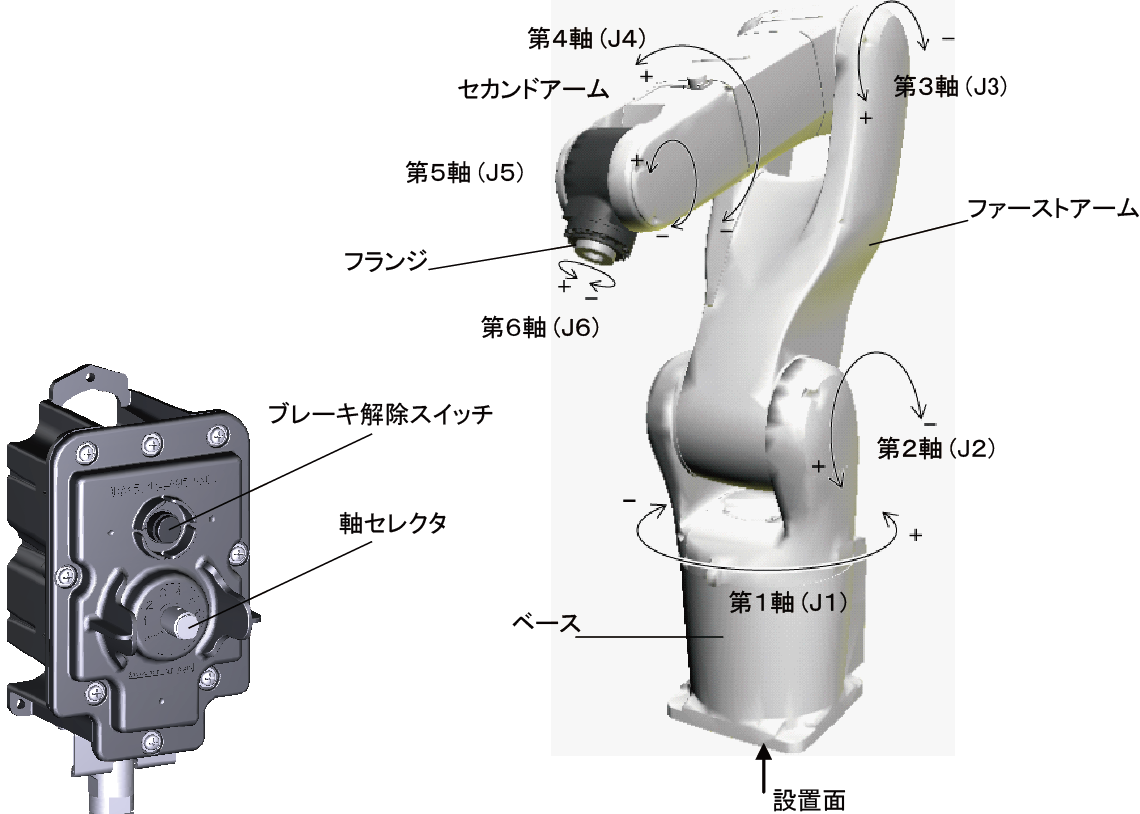
UL仕様の場合
ブレーキ解除ユニットでブレーキを解除します。操作方法は以下のとおりです。
- 軸セレクタスイッチで解除したい軸を選択します。
- ブレーキ解除ボタンを押します。
コントローラの電源がONのときのみブレーキ解除できます。
UL仕様には、ファーストアームの左右側面にモータONランプが装着されています。
ID : 52