
ID : 7909
I/Oのマッピング
ロボットコントローラとPLC間でフィールドネットワーク通信を行うために、入出力用グローバル変数をマッピングする必要があります。
下記に、その手順を説明します。
1
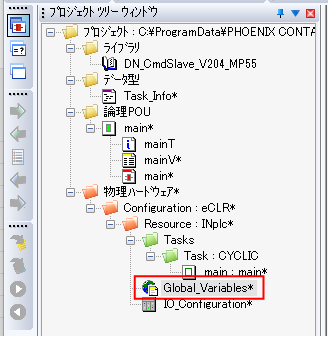
「プロジェクトツリーウィンドウ」の「Global_Variables」をダブルクリックします。
2
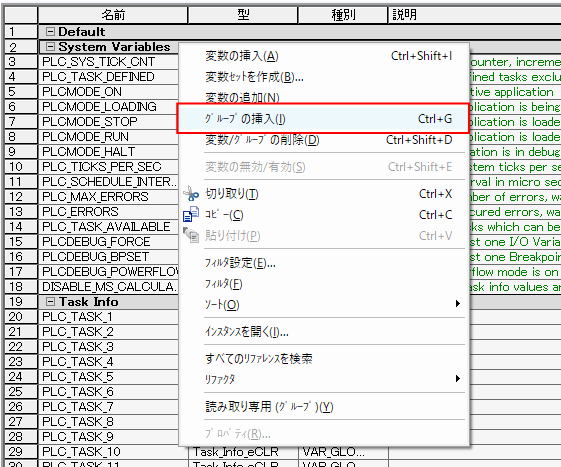
グローバル変数リストが表示されます。
グローバル変数リスト上で右クリックします。
[グループの挿入]をクリックします。
3
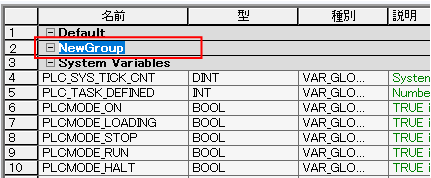
「NewGroup」がリストに追加されます。グループの名前は任意で設定していください。
4
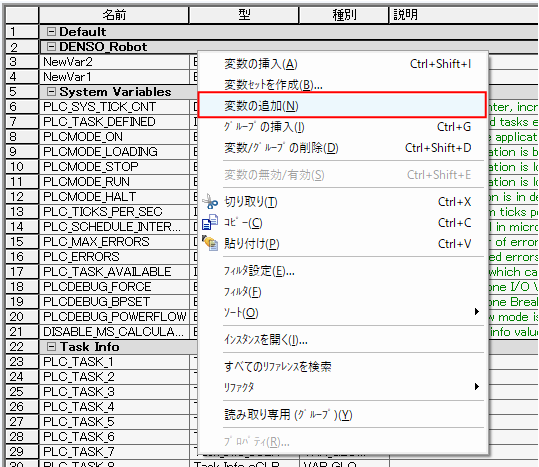
作成したグループ上で右クリックします。
[変数の追加]をクリックし、変数を追加します。
これを繰り返し、変数を2個作成します。
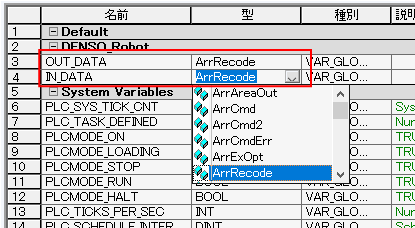
5
変数の名前は、入力用と出力用が区別できるように任意で設定してください。
型は、「ArrRecode」を選択します。
「ArrRecode」は弊社提供の構造体です。
6
"I/Oの設定"で作成したアドレスに入力用のグローバル変数をマッピングします。
入力用の変数のアドレスに、"I/Oの設定"で作成したアドレスをDWORD型で入力します。
例えば、開始アドレスを"0"にした場合、"%ID0"を入力します。

7
"I/Oの設定"で作成したアドレスに出力用のグローバル変数をマッピングします。
出力用の変数のアドレスに、"I/Oの設定"で作成したアドレスをDWORD型で入力します。
例えば、開始アドレスを"0"にした場合、"%QD0"を入力します。

以上で、入出力用グローバル変数のマッピングは完了です。
ID : 7909