
ID : 7646
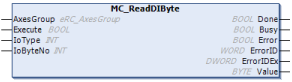
MC_ReadDIByte
ロボットコントローラのI/O入力信号の状態を取得します。(Byte)
| グラフィック表示 | FBカテゴリ |
|---|---|
 |
非動作 |
入出力変数
| 変数名 | データ型 | 有効範囲 | 初期値 | 省略 |
|---|---|---|---|---|
| AxesGroup | eRC_AxesGroup | 不可 | ||
|
||||
入力変数
| 変数名 | データ型 | 有効範囲 | 初期値 | 省略 |
|---|---|---|---|---|
| Execute | BOOL |
|
FALSE | 不可 |
|
||||
| IoType | INT | 0,1 | 0 | 不可 |
|
||||
| IoByteNo | INT |
|
0 | 不可 |
|
||||
出力変数
| 変数名 | データ型 / 説明 |
|---|---|
| Done | BOOL |
|
|
| Busy | BOOL |
|
|
| Error | BOOL |
|
|
| ErrorID | WORD |
|
|
| ErrorIDEx | DWORD |
|
|
| Value | BYTE |
|
機能説明
ロボットコントローラのI/O入力信号の状態を取得します。
以下に、Byte番号とロボットコントローラのポート番号との対応表を示します。
- Hand I/O
IoByteNo ロボットコントローラ ポート番号 ロボットコントローラ I/O名称 0 48 ハンド入力 49 ハンド入力 50 ハンド入力 51 ハンド入力 52 ハンド入力 53 ハンド入力 54 ハンド入力 55 ハンド入力 - Mini I/O
IoByteNo ロボットコントローラ ポート番号 ロボットコントローラ I/O名称 0 0 汎用入力 1 汎用入力 2 汎用入力 3 汎用入力 4 汎用入力 5 汎用入力 6 汎用入力 7 汎用入力 1 8 汎用入力 9 汎用入力 10 汎用入力 11 汎用入力 12 汎用入力 13 汎用入力 14 汎用入力 15 汎用入力
注意事項
Mini I/OのI/O割り付けが「全汎用」の場合のみ使用できます。
ID : 7646