
ID : 7625
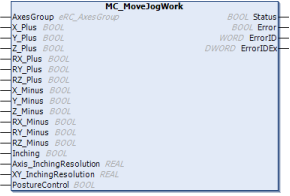
MC_MoveJogWork
操作盤等を使って、ロボットをXYモードで操作します。
| グラフィック表示 | FBカテゴリ |
|---|---|
 |
動作 |
入出力変数
| 変数名 | データ型 | 有効範囲 | 初期値 | 省略 |
|---|---|---|---|---|
| AxesGroup | eRC_AxesGroup | 不可 | ||
|
||||
入力変数
| 変数名 | データ型 | 有効範囲 | 初期値 | 省略 |
|---|---|---|---|---|
| X_Plus | BOOL |
|
FALSE | 可能 |
|
||||
| Y_Plus | BOOL |
|
FALSE | 可能 |
|
||||
| Z_Plus | BOOL |
|
FALSE | 可能 |
|
||||
| RX_Plus | BOOL |
|
FALSE | 可能 |
|
||||
| RY_Plus | BOOL |
|
FALSE | 可能 |
|
||||
| RZ_Plus | BOOL |
|
FALSE | 可能 |
|
||||
| X_Minus | BOOL |
|
FALSE | 可能 |
|
||||
| Y_Minus | BOOL |
|
FALSE | 可能 |
|
||||
| Z_Minus | BOOL |
|
FALSE | 可能 |
|
||||
| RX_Minus | BOOL |
|
FALSE | 可能 |
|
||||
| RY_Minus | BOOL |
|
FALSE | 可能 |
|
||||
| RZ_Minus | BOOL |
|
FALSE | 可能 |
|
||||
| Inching | BOOL |
|
FALSE | 可能 |
|
||||
| Axis_InchingResolution | REAL | 0.0001 ~ 0.1 | 0.0004 | 可能 |
|
||||
| XY_InchingResolution | REAL | 0.01 ~ 1 | 0.01 | 可能 |
|
||||
| PostureControl | BOOL |
|
TRUE | 可能 |
|
||||
出力変数
| 変数名 | データ型 / 説明 |
|---|---|
| Status | BOOL |
|
|
| Error | BOOL |
|
|
| ErrorID | WORD |
|
|
| ErrorIDEx | DWORD |
|
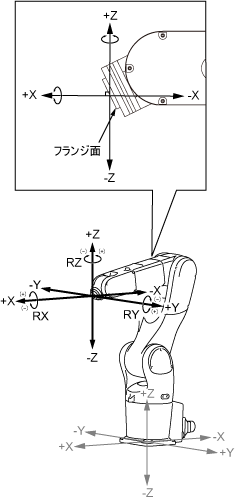
機能説明
下図にXYモードにおけるロボットの操作を示します。
| 6軸ロボット | 4軸ロボット |
|---|---|
 |
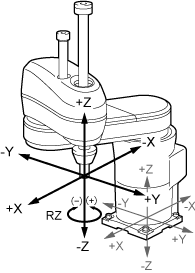 |
| 直交座標に沿って直線動作します。 | 直交座標に沿って直線動作します。 |
注意事項
このFBを実行するには、FBカテゴリ"動作"のFBを実行可能状態にしておく必要があります。
FBカテゴリ"動作"のFBを実行可能状態にするにはFB"MC_Power"を使用します。
ID : 7625