
ID : 7601
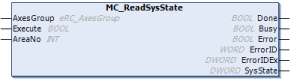
MC_ReadSysState
ロボットコントローラのステータスを返します。
| グラフィック表示 | FBカテゴリ |
|---|---|
 |
非動作 |
入出力変数
| 変数名 | データ型 | 有効範囲 | 初期値 | 省略 |
|---|---|---|---|---|
| AxesGroup | eRC_AxesGroup | 不可 | ||
|
||||
入力変数
| 変数名 | データ型 | 有効範囲 | 初期値 | 省略 |
|---|---|---|---|---|
| Execute | BOOL |
|
FALSE | 不可 |
|
||||
| AreaNo | INT | 0 ~ 31 | 0 | 可能 |
|
||||
出力変数
| 変数名 | データ型 / 説明 |
|---|---|
| Done | BOOL |
|
|
| Busy | BOOL |
|
|
| Error | BOOL |
|
|
| ErrorID | WORD |
|
|
| ErrorIDEx | DWORD |
|
|
| SysState | DWORD |
|
機能説明
取得した値のBit状態を以下の表に示します。
| Bit | 状態 |
|---|---|
| 0 | ロボット運転中(プログラム動作中) |
| 1 | ロボット異常 |
| 2 | サーボOn中 |
| 3 | ロボット初期化完了(I/O 標準、MiniIO専用モード選択時)/ ロボット電源入り完了(I/O 互換モード選択時) |
| 4 | 自動モード |
| 5 | 自動モードで起動権がティーチングペンダント以外にある場合 |
| 6 | バッテリ切れ警告 |
| 7 | ロボット警告 |
| 10 | 非常停止状態 |
| 11 | 自動運転イネーブル |
| 12 | 防護停止 |
| 18 | 手動モードまたはティーチチェックモード |
| 20 | ロボット動作中(指令値レベル) |
| 21 | ロボット動作中(エンコーダレベル) |
注意事項
-
ID : 7601