
ID : 7579
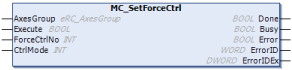
MC_SetForceCtrl
力制御機能(コンプライアンス機能)を有効にします。
| グラフィック表示 | FBカテゴリ |
|---|---|
 |
動作 |
入出力変数
| 変数名 | データ型 | 有効範囲 | 初期値 | 省略 |
|---|---|---|---|---|
| AxesGroup | eRC_AxesGroup | 不可 | ||
|
||||
入力変数
| 変数名 | データ型 | 有効範囲 | 初期値 | 省略 |
|---|---|---|---|---|
| Execute | BOOL |
|
FALSE | 不可 |
|
||||
| ForceCtrlNo | INT | 1 ~ 10 | 1 | 可能 |
|
||||
| CtrlMode | INT | 0,1 | -1 | 可能 |
|
||||
出力変数
| 変数名 | データ型 / 説明 |
|---|---|
| Done | BOOL |
|
|
| Busy | BOOL |
|
|
| Error | BOOL |
|
|
| ErrorID | WORD |
|
|
| ErrorIDEx | DWORD |
|
機能説明
力制御機能は、ロボットの力を制御する機能です。機能には以下の2種類があります。
| コンプライアンス機能 | ロボットやそれに付随する工具などの振舞いが、外部からの作用に対して柔軟に対応することができる機能 |
|---|---|
| 力センサ有コンプライアンス機能 | 力センサを使って、ロボットの手先の押し付け力を一定に制御する機能 |
注意事項
このFBを実行するには、FBカテゴリ"動作"のFBを実行可能状態にしておく必要があります。
FBカテゴリ"動作"のFBを実行可能状態にするにはFB"MC_Power"を使用します。
ID : 7579