
ID : 7567
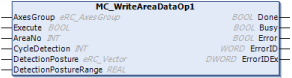
MC_WriteAreaDataOp1
指定した検知エリアのオプション(検出間隔、検出姿勢)を設定します。
| グラフィック表示 | FBカテゴリ |
|---|---|
 |
非動作 |
入出力変数
| 変数名 | データ型 | 有効範囲 | 初期値 | 省略 |
|---|---|---|---|---|
| AxesGroup | eRC_AxesGroup | 不可 | ||
|
||||
入力変数
| 変数名 | データ型 | 有効範囲 | 初期値 | 省略 |
|---|---|---|---|---|
| Execute | BOOL |
|
FALSE | 不可 |
|
||||
| AreaNo | INT | 0 ~ 31 | 0 | 可能 |
|
||||
| CycleDetection | INT | 0 ~ 4 | -1 | 可能 |
|
||||
| DetectionPosture | eRC_Vector | 0.0 | 可能 | |
|
||||
| DetectionPostureRange | REAL | 0以上 | -1.0 | 可能 |
|
||||
出力変数
| 変数名 | データ型 / 説明 |
|---|---|
| Done | BOOL |
|
|
| Busy | BOOL |
|
|
| Error | BOOL |
|
|
| ErrorID | WORD |
|
|
| ErrorIDEx | DWORD |
|
機能説明
-
注意事項
エリアの検知 (チェック) が有効な状態で、ワーク座標を変更する場合、変更後のワーク座標がエリアの判定に反映されるまで、最大10msかかります。
確実にワーク座標変更後の座標値でエリアを検知したい場合は、ワーク座標を変更する前に、ロボットを、エリアに干渉しない状態にし (例 : ロボットを停止させる)、ワーク座標を変更後、十分な時間待った後に、ロボットを再稼働してください。
ID : 7567