
ID : 7472
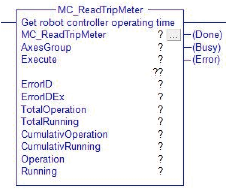
MC_ReadTripMeter
ロボットコントローラの稼働時間を読込みます。
| グラフィック表示 | AOIカテゴリ |
|---|---|
 |
非動作 |
入出力変数
| 変数名 | データ型 | 有効範囲 | 入出力条件 |
|---|---|---|---|
| AxesGroup | eRC_AxesGroup | - | |
|
|||
入力変数
| 変数名 | データ型 | 有効範囲 |
|---|---|---|
| Execute | BOOL |
|
|
||
出力変数
| 変数名 | データ型 / 説明 |
|---|---|
| Done | BOOL |
|
|
| Busy | BOOL |
|
|
| Error | BOOL |
|
|
| ErrorID | INT |
|
|
| ErrorIDEx | DINT |
|
|
| TotalOperation | DINT |
|
|
| TotalRunning | DINT |
|
|
| CumulativOperetion | DINT |
|
|
| CumulativRunning | DINT |
|
|
| Operation | DINT |
|
|
| Running | DINT |
|
機能説明
-
注意事項
-
ID : 7472