
ID : 6443
RC8A ロボット調整時に必要となる結線(セーフティI/Oレス)
ロボット立上げ調整時に、ロボット単体でモータON、自動運転、手動運転操作をおこなうために最低限必要となる結線について説明します。
非常停止回路の構成
外部非常停止と自動イネーブルの信号は、安全のために重要な信号です。下図に示すように、必ず有接点の回路で構成してください。
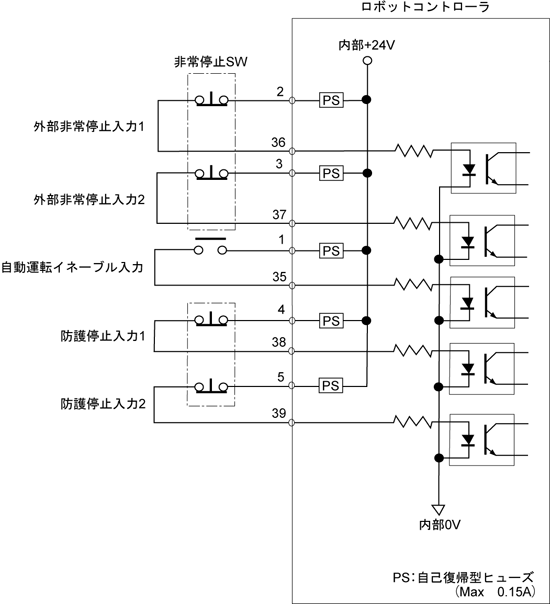
モータ入りに必要な結線
非常停止入力が2系統ともに短絡状態の場合に限り、モータONが可能になります。
| 信号名 | 端子番号 |
|---|---|
| 外部非常停止入力1 | Mini I/OのNo.2と36 |
| 外部非常停止入力2 | Mini I/OのNo.3と37 |
非常停止2系統の状態が約1秒以上異なる場合には、エラー「非常停止信号の1 系統が入力されていま
せん。」が発生します。
自動運転に必要な結線
- 短絡状態でロボットを自動モードへ切替可能にします。
- 開放状態でロボットを手動モード、ティーチチェックモードへ切替え可能にします。
| 信号名 | 端子番号 |
|---|---|
| 自動イネーブル入力 | Mini I/OのNo.1と35 |
| 防護停止入力1 | Mini I/OのNo.4と38 |
| 防護停止入力2 | Mini I/OのNo.5と39 |
防護停止を必要としない場合は、No.4と38、No.5と39をジャンパ接続し常時短絡として使用ください。
ID : 6443