
ID : 6018
最適速度制御機能
ロボットアームの先端に取り付ける、ツールやワークの質量と重心位置により、最適な速度や加速度は異なります。このため、ロボットの先端負荷や姿勢に応じて、ツールやワークの質量と重心位置および、モードを設定します。
詳しくは、機能ガイドの「最適速度制御機能」を参照してください。また、設定の手順については、「最適速度制御機能の設定方法」を参照してください。
先端負荷質量は、ツール及びワークの総質量で、単位はgです。
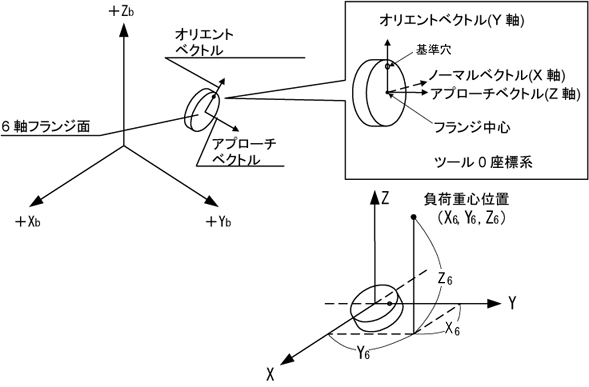
負荷重心位置は、TOOL0座標系で表現します。単位はmmです。
6軸ロボットの場合
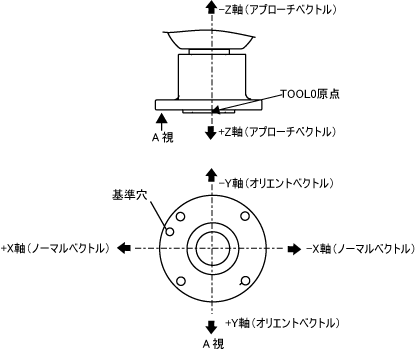
6軸ロボットのTOOL0座標系は下図のように定義されています。
TOOL0座標系の原点は、6軸のフランジ中心です。
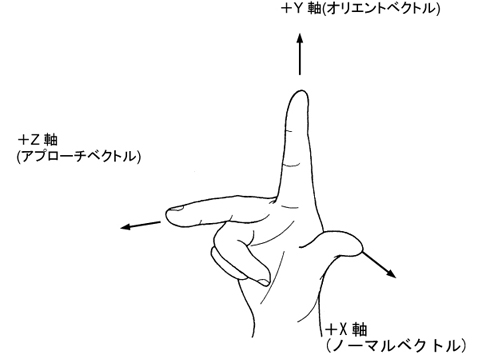
TOOL0座標系のY成分はフランジ中心から基準穴方向(オリエントベクトル方向)、Z成分はフランジ中心を通りフランジ面に垂直な方向(アプローチベクトル方向)、X成分は、オリエントベクトルをY軸、アプローチベクトルをZ軸とした時の、右手座標系におけるX軸方向(ノーマルベクトル方向)です。
なお、基準穴とは、VMはφ6H7、その他はφ5H7のピン穴のことです。
右手座標系
4軸ロボットの場合
4軸ロボットのTOOL0座標系は下図のように定義されています。
TOOL0座標系の原点は、4軸のフランジ中心です。
ID : 6018