
ID : 5931
作業内容
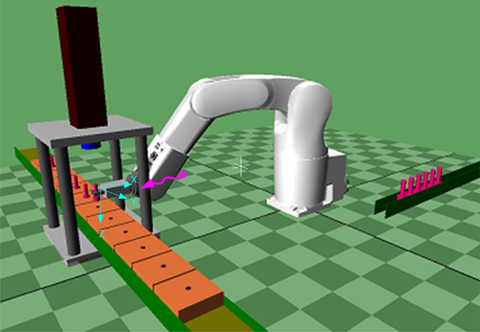
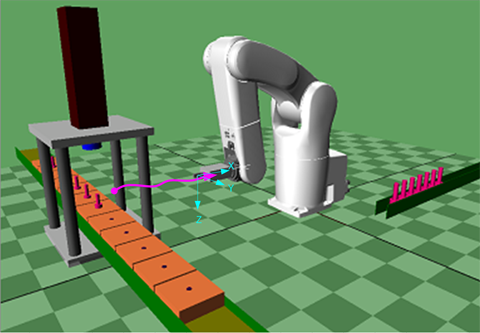
ロボットは以下のように、ワークを把持し圧入を補佐します。圧入時にコンプライアンス機能を有効にすることで、プレス方向に倣います。
1
ツール座標系をTOOL1に変更して、ワーク上空位置(P1のアプローチ位置)へ移動します。
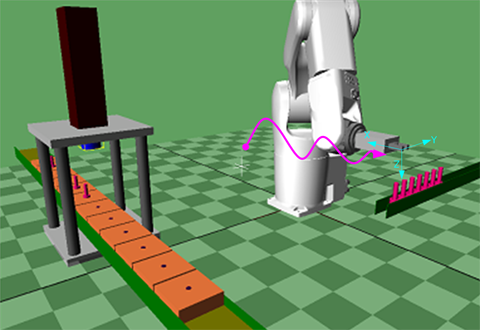
2
ワーク位置(P1)へ移動して、ワークをチャックします。
3
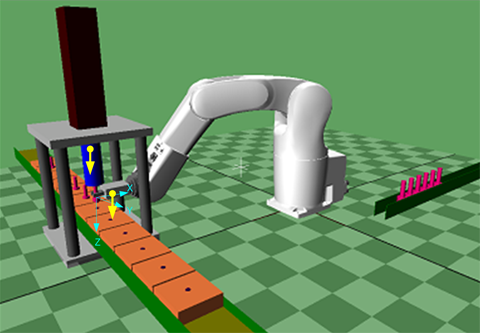
ワーク位置から上空(P1からツール座標-Z方向)へ移動します。
4
プレス前位置(P2)へ移動します。
5
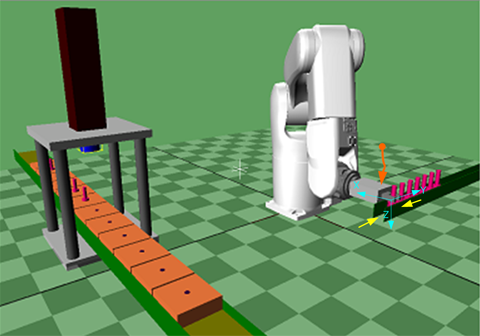
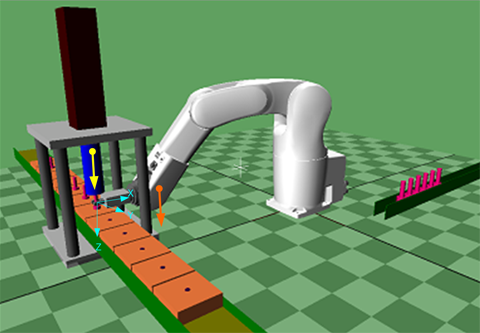
圧入上空位置(P3のアプローチ位置)へ移動します。
6
圧入位置(P3)へ移動し、コンプライアンス機能を有効にします。
プレスを起動します。
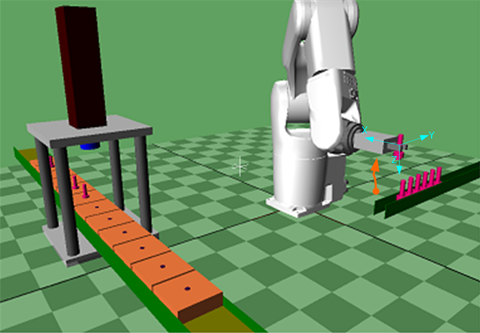
7
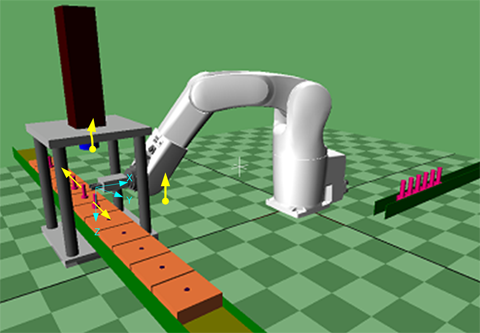
圧入が開始されます。この時コンプライアンス機能が有効であるため、ロボットはプレス方向に倣います。
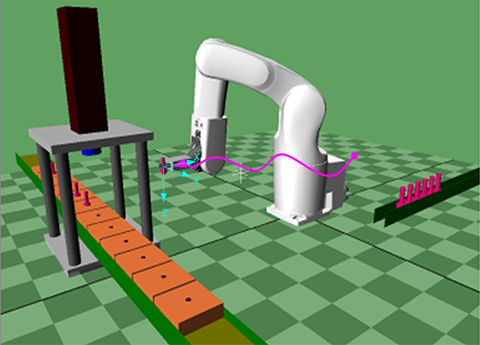
8
圧入完了後、プレスを上昇させ、コンプライアンス機能を無効にします。
ワークをアンチャックし、圧入位置から上空(P3からツール座標-Z方向)へ戻ります。
9
プレス前位置(P2)へ戻ります。
ID : 5931