文字サイズ
<< 前へ 次へ >>
ID : 5777
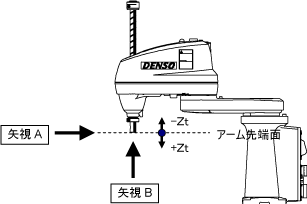
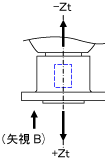
ハンドやツールを取付ける、ロボットのアーム先端をメカニカルインタフェースと呼びます。4軸ロボットのメカニカルインタフェースは、標準仕様のシャフト型と、別売りのフランジを取付けたフランジ型の二種類があります。
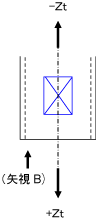
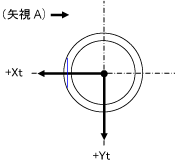
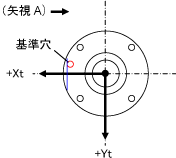
下図のように、シャフト先端またはフランジ中心を原点とする3次元直交座標を、メカニカルインタフェース座標系と呼びます。
 HOME
HOME