
ID : 5774
WINCAPSIIIからプログラムを起動する
デバッグ機能は、モニタ機能に加え、プログラムの起動など実際にロボットをWINCAPSIIIで制御することができます。
操作手順
1
実行するプログラムを「プロジェクトウィンドウ」または「プログラム一覧」ウィンドウでダブルクリックします。
プログラムを「プログラムビュー」に表示します。
2
「デバッグ」メニューから「起動」を実行します。
確認ダイアログが表示されます。
3
起動方法を選択し、「OK」ボタンをクリックします。
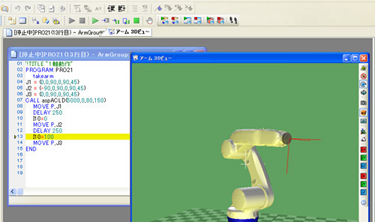
プログラムに従ってロボットが動作します。
「アーム3Dビュー」を表示していれば、「アーム3Dビュー」内のロボットも実際のロボット同様に動作します。
デバック機能でWINCAPSIIIから特権タスクを起動した場合に、特権タスクに対して以下の操作を行うことができます。
- ステップ送り/ ステップ停止
- 瞬時停止
- プログラムリセット
- ブレイクポイントの設定/ 解除
ただし、全プログラムに対する停止命令(非常停止やプログラムリセット)では特権タスクは止まりません。
WINCAPSIIIの各種停止ボタンは、パソコンの異常終了やネットワークの断線等で機能しない場合があります。デバッグ機能を使用する場合は、必ずティーチングペンダント、ミニペンダントまたは設備等の非常停止ボタンをすぐに押せる場所で行ってください。
4
デバック機能を解除します。
「通信」メニューから「接続状態」/「オフライン」を選択し、「OK」ボタンを押すとデバック機能が解除されます。
ID : 5774