
ID : 5610
仕様とバリエーション
| 項目 | 仕様 | ||||
|---|---|---|---|---|---|
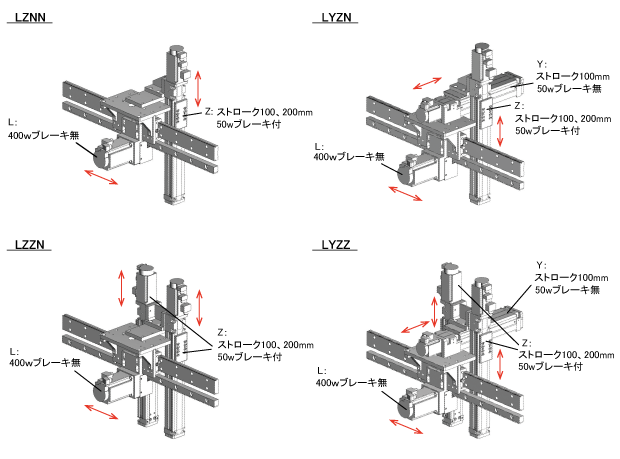
| ロボットタイプ | LZNN | LZZN | LYZN | LYZZ | |
| 軸動作ストローク | J1 | 600~12000mm | |||
| J2 | 100、200mm | 100mm | |||
| J3 | - | 100、200mm | |||
| J4 | - | - | - | 100、200mm | |
| 最大可搬質量 | 5kg /Z *1 | ||||
| 最大速度 | J1 | 2m/s | |||
| J2 | 500mm/s | ||||
| J3 | - | 500mm/s | |||
| J4 | - | - | - | 500mm/s | |
| 位置繰返し精度 | L:±0.05mm Y、Z:±0.02mm | ||||
| ブレーキ | J2:ブレーキ付 | J2、3:ブレーキ付 | J3:ブレーキ付 | J3、4:ブレーキ付 | |
| 質量 | 7kg | 9kg | 10kg | 12kg | |
| 項目 | 仕様 | ||||
|---|---|---|---|---|---|
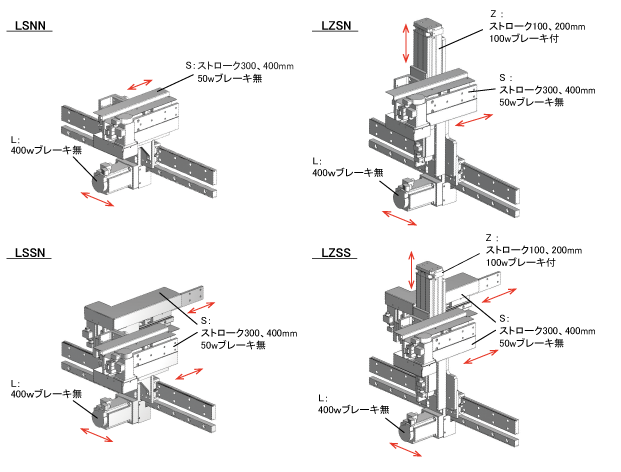
| ロボットタイプ | LSNN | LSSN | LZSN | LZSS | |
| 軸動作ストローク | J1 | 600~12000mm | |||
| J2 | 300、400mm | 100、200mm | |||
| J3 | - | 300、400mm | |||
| J4 | - | - | - | 300、400mm | |
| 最大可搬質量 | 3kg/S (S軸400mmの場合2kg/S) *1 | ||||
| 最大速度 | J1 | 2m/s | |||
| J2 | 1000mm/s | 500mm/s | |||
| J3 | - | 1000mm/s | |||
| J4 | - | - | - | 1000mm/s | |
| 位置繰返し精度 | L、S:±0.05mm Z:±0.02mm | ||||
| ブレーキ | - | J2:ブレーキ付 | |||
| 質量 | 9kg | 12kg | 13kg | 16kg | |
*1 「可搬負荷の許容範囲 (PDF:272KB)」にて、重心位置の範囲をご確認ください。重心位置が許容範囲外にある場合は、質量を減らす必要があります。
バリエーション
バリエーションを以下に示します。
ケーブルベヤの取付け方向に指定はありません。
ID : 5610