
ID : 5447
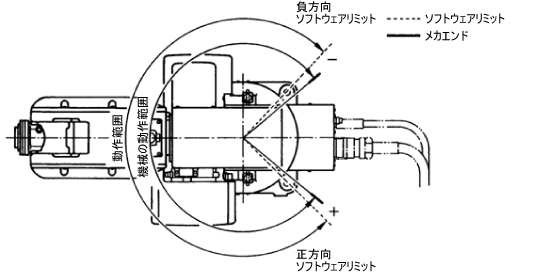
ソフトウェアリミット
物理的な衝突やメカエンドへの接触によるダメージを避けるため、ソフトウェアによって軸ごとに可動範囲(ソフトウェアリミット)を設定します。
出荷時のソフトウェアリミットはメカエンドの少し手前に設定されています。
ロボットが手動動作や自動動作中にソフトウェアリミットに達すると、エラーメッセージを表示して、停止します。自動運転の場合は、モータ電源も切れます。
ソフトウェアリミットで設定された範囲の中にロボットが入ったあとに有効になります。
ソフトウェアリミットは安全規格に準じた機能ではありません。
|
|
ソフトウェアリミットの出荷時の設定値[VS-6556/6577シリーズ]
|
ロボットの型式 |
第1軸 | 第2軸 | 第3軸 | 第4軸 | 第5軸 | 第6軸 | |
|---|---|---|---|---|---|---|---|
|
VS- 6556型 |
正方向 | 170度 | 135度 | 166度 | 190度 | 120度 | 360度 |
| 負方向 | -170度 |
-100度 (最大) |
-119度 (最大) |
-190度 | -120度 | -360度 | |
|
VS-6577型 |
正方向 | 170度 | 135度 | 169度 | 190度 | 120度 | 360度 |
| 負方向 | -170度 | -100度 | -119度 | -190度 | -120度 | -360度 | |
VS-6556型の第2、第3軸は、ロボットの姿勢により可動範囲に制限がかかります。
ソフトウェアリミットを変更するときの注意点
実際の作業環境での、ロボットの動作する範囲を確認してください。また、単位を間違わないよう注意してください。
ソフトウェアリミットを変更した直後など、ロボットの現在位置がソフトウェアリミットを越えた位置にある場合、手動操作で可動範囲方向のみ動作可能です。手動操作時は各軸モードにてソフトウェアリミット内に動かしてください。
ソフトウェアリミットの変更手順
ティーチングペンダントのソフトウェアリミット設定画面で値を変更し、ロボットコントローラの電源を再投入します。
操作方法についてはティーチングペンダント操作ガイドの「ソフトウェアリミットの表示・設定」を参照してください。
変更されたソフトウェアリミットはコントローラの電源再投入後に有効になります。
ID : 5447
- このページに関連する情報
- ソフトウェアリミットの変更例