
ID : 5440
第2軸メカエンドの変更
VS-6556/6577シリーズは工場出荷時に、第2軸の動作角度が下表の角度になるように、メカエンドを設けています。
動作角度はメカエンド内側に設定されるソフトウェアリミットによって決まります。
工場出荷時の動作角度(VS-6556/6577シリーズ)
| ロボット型式 | 2軸の動作角度 |
|---|---|
| VS-6556型 | +135°、-100° |
| VS-6577型 | 上記同様 |
メカストッパを追加し、第2軸のメカエンドを変更することをメカエンド変更と言います。
第2軸のメカエンドを変更するには、お客様にてメカストッパを準備していただく必要があります。
メカエンドの位置を変更した場合は、メカエンドの内側にソフトウェアリミット(PLIM、NLIM)を変更してください。
また、メカエンドの変更に伴いRANG値を変更する場合は、CALSETが必要です。
RANG値とはロボットの基準位置とメカエンドとの関係を決める角度であり、基準角度またはレディーアングル(Ready angle)とも言います。
- CALSETが必要なとき(例えばモータ交換時など)に、お客様が用意したメカエンド変更部品を取り外してCALSETを行なう場合は、メカエンド変更時にRANG値の変更とCALSETは必要ありません。
- CALSETが必要なときに、メカエンド変更部品をそのまま装着してCALSETを行なう場合は、このメカエンド変更に伴いRANGの値の変更、CALSETが必要です。 この場合、精度はお客様の製作したメカエンド変更部品に依存しますので、ご注意ください。 また、RANG値、CALSET値の変更後の値の管理は「プロジェクトのバックアップについて」を参考にして、お客様にて行なってください。
第2軸のメカエンドの変更では、RANG値の変更とCALSETを行なわない例で記載してあります。
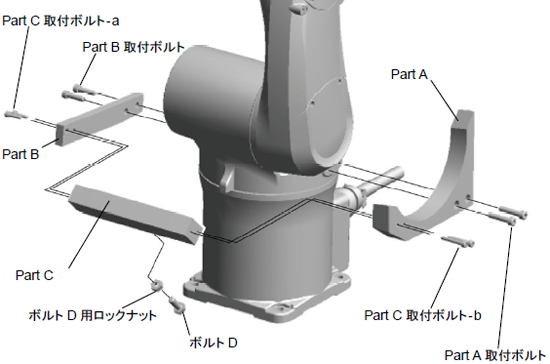
2軸メカエンド変更の概要
2軸メカエンドを変更するには、以下の部品をロボット本体に取付けます。
ID : 5440
- このページに関連する情報
- 2軸メカエンドの製作図面例