
ID : 5381
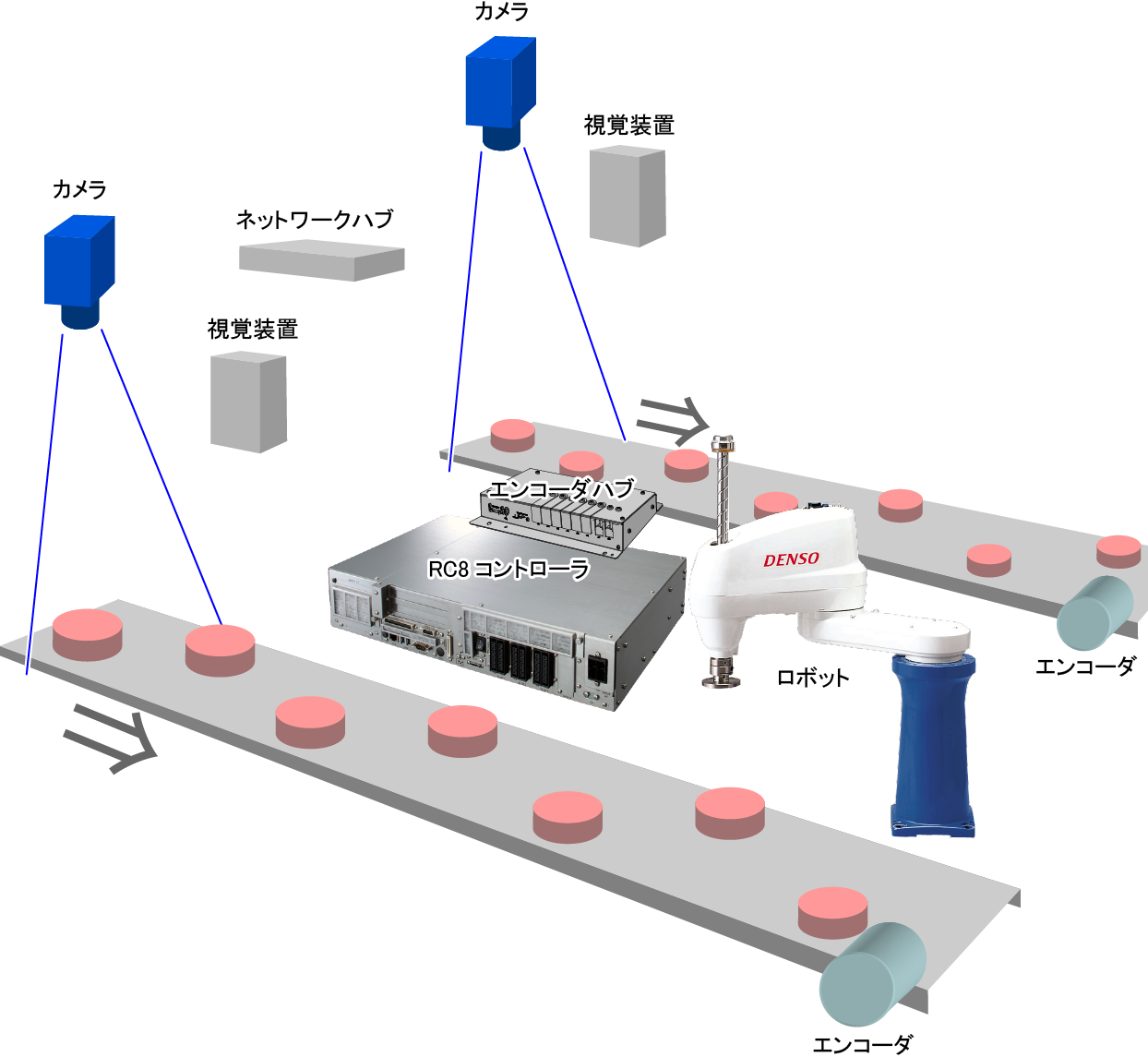
コンベア2台、ロボット1台の構成
下図に、ビジョントラッキングの例を示します。
コンベアの動きが遅く、ロボットのピックアップ動作に余裕がある場合などに使用します。
ワークの位置情報を取り込む時に、コンベア番号も取り込み、ロボットはその情報を基に該当するコンベア上のワークをピックアップします。
コンベアトラッキング
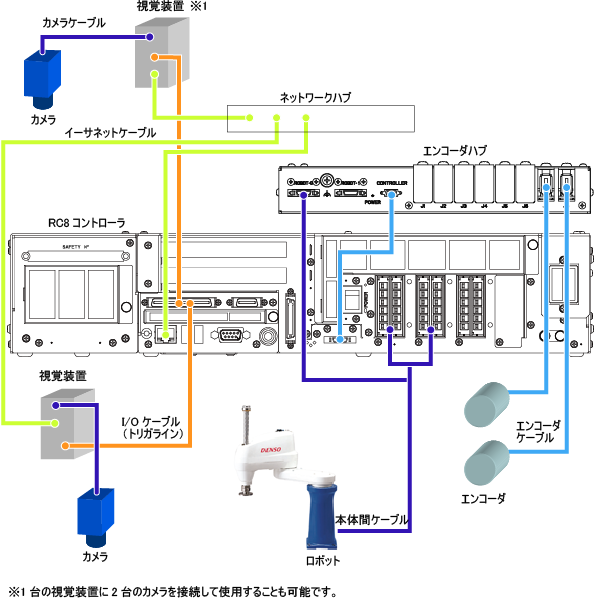
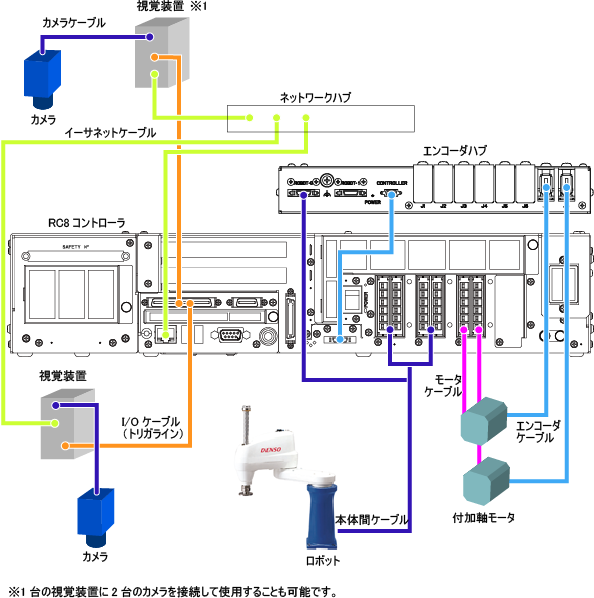
結線図
結線については以下を参照ください。
2台のコンベアのエンコーダは、マスターコントローラに接続しておく必要があります。
エンコーダハブについて
エンコーダハブは旧品と新規品があります。
新規品を使用する場合、本体間ケーブルのエンコーダ線は、エンコーダハブの"ROBOT-0"と印字されている方 (正面から見て左側) のコネクタに接続してください。
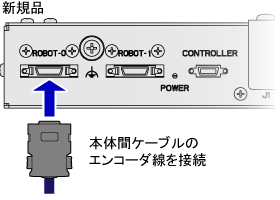
外形寸法および設置上の注意については、"エンコーダハブ"を参照してください。
付加軸トラッキング
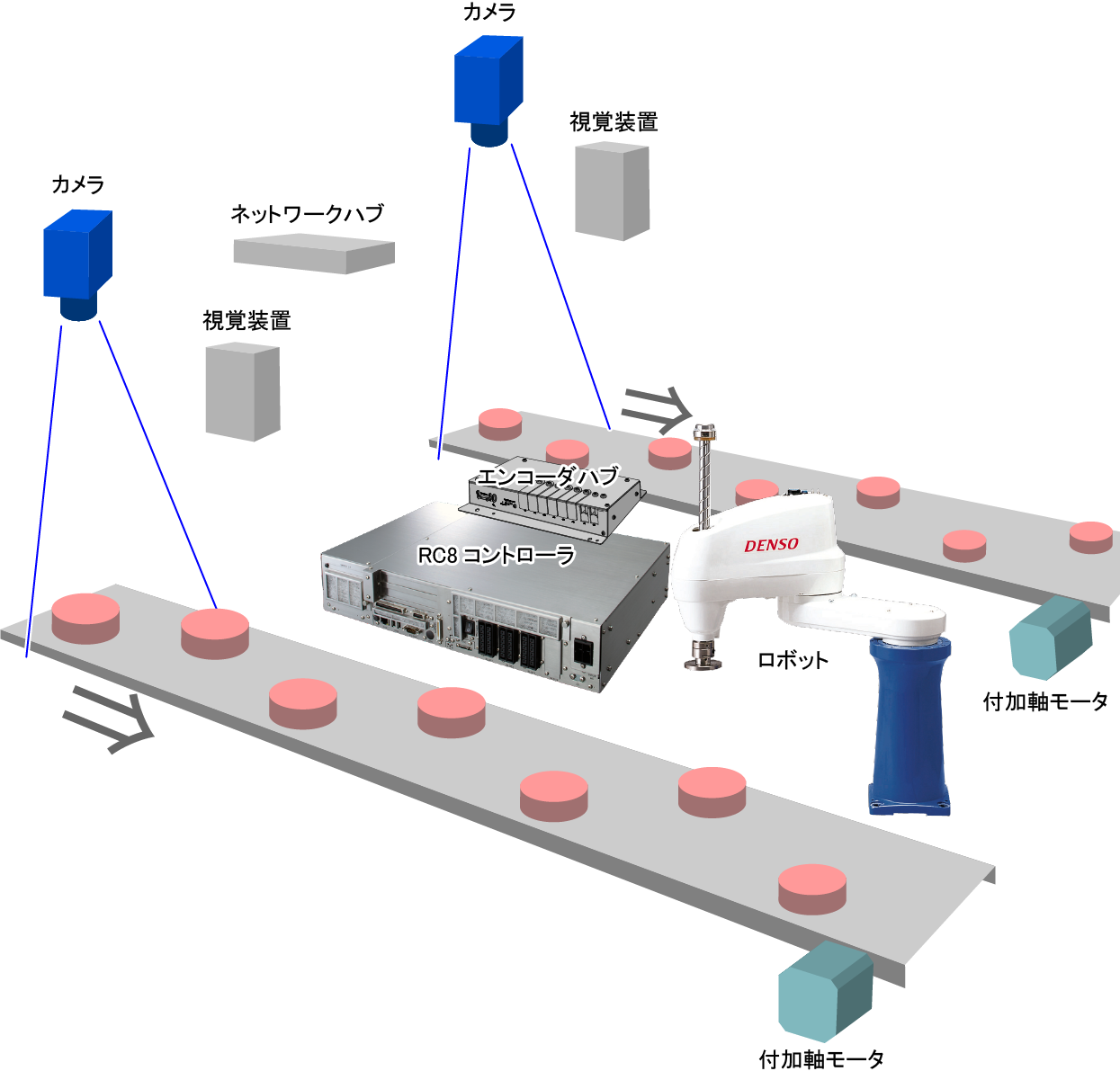
結線図
エンコーダハブについて
エンコーダハブは旧品と新規品があります。
新規品を使用する場合、本体間ケーブルのエンコーダ線は、エンコーダハブの"ROBOT-0"と印字されている方 (正面から見て左側) のコネクタに接続してください。
外形寸法および設置上の注意については、"エンコーダハブ"を参照してください。
ID : 5381