
ID : 5380
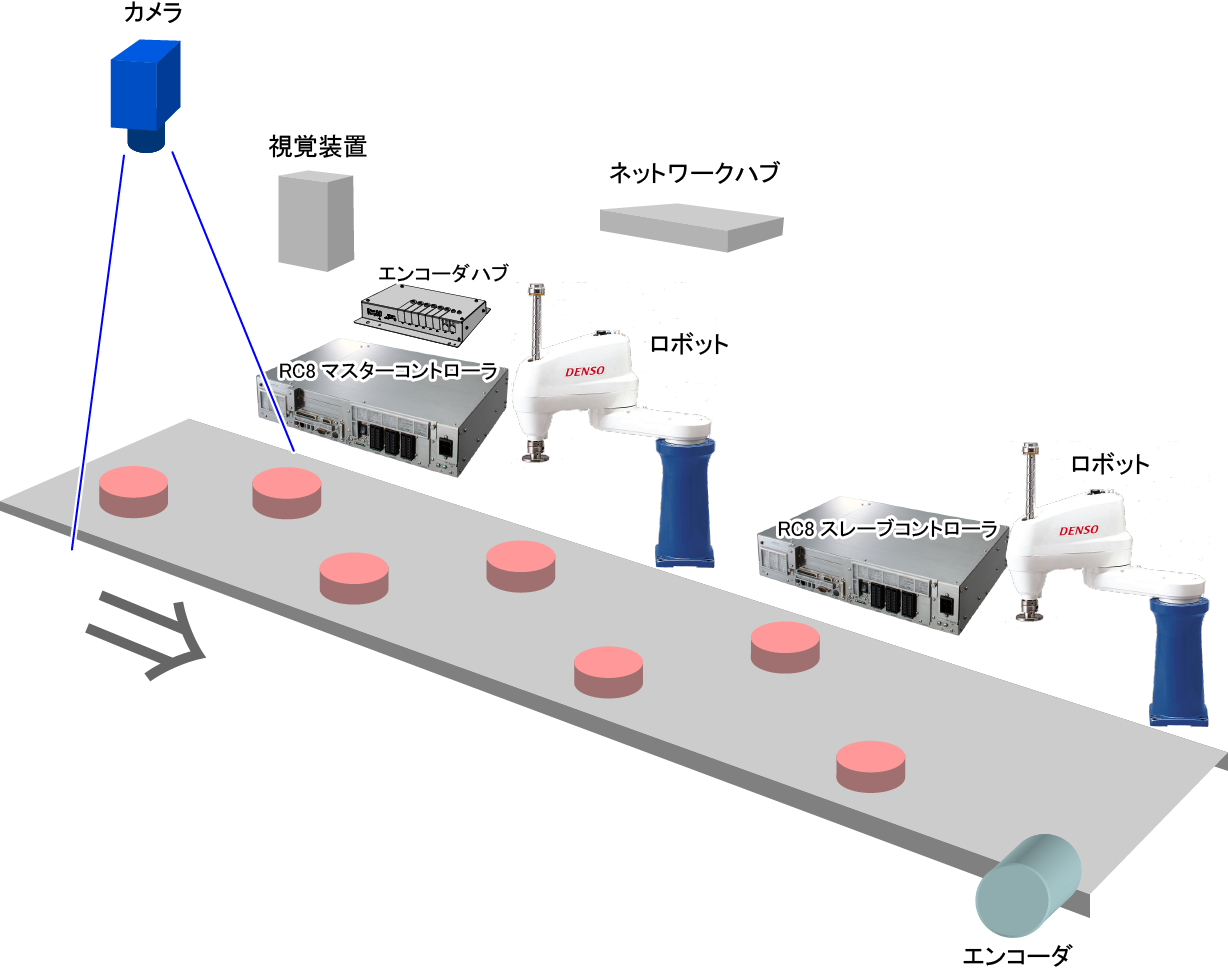
コンベア1台、ロボット2台以上の構成
下図に、ビジョントラッキングの例を示します。
コンベアの動きが速く、ロボット1台で取り切れない場合などに使用します。
コントローラは、1台がマスタコントローラ、残りはスレーブコントローラとして使用します。使用可能なスレーブ台数は最大3台までとなります。
マスタコントローラは、視覚装置とエンコーダを接続し、ワークの位置情報の取り込みと、ロボットによるワークのピックアップを行ないます。
スレーブコントローラは、マスタコントローラとイーサネットケーブルで接続し、マスタコントローラで取り込んだワークの位置情報を基に、ワークのピックアップを行ないます。
コンベアトラッキング
- 複数台のロボットを設置する場合は、ロボット間の干渉がないように配置してください。
- マスタコントローラとスレーブコントローラは同じ仕様(付加軸あり、コンベアトラッキングのライセンスあり、同一ソフトバージョン)であることが必要です。
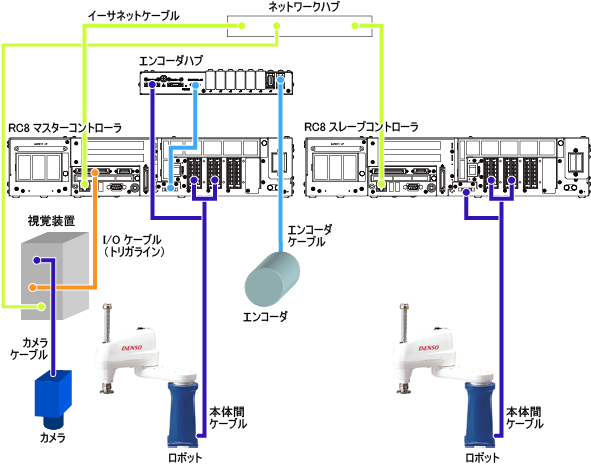
結線図
結線については以下を参照ください。
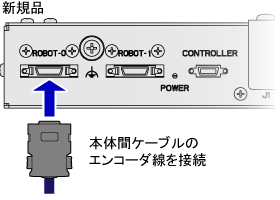
エンコーダハブについて
エンコーダハブは旧品と新規品があります。
新規品を使用する場合、本体間ケーブルのエンコーダ線は、エンコーダハブの"ROBOT-0"と印字されている方 (正面から見て左側) のコネクタに接続してください。
外形寸法および設置上の注意については、"エンコーダハブ"を参照してください。
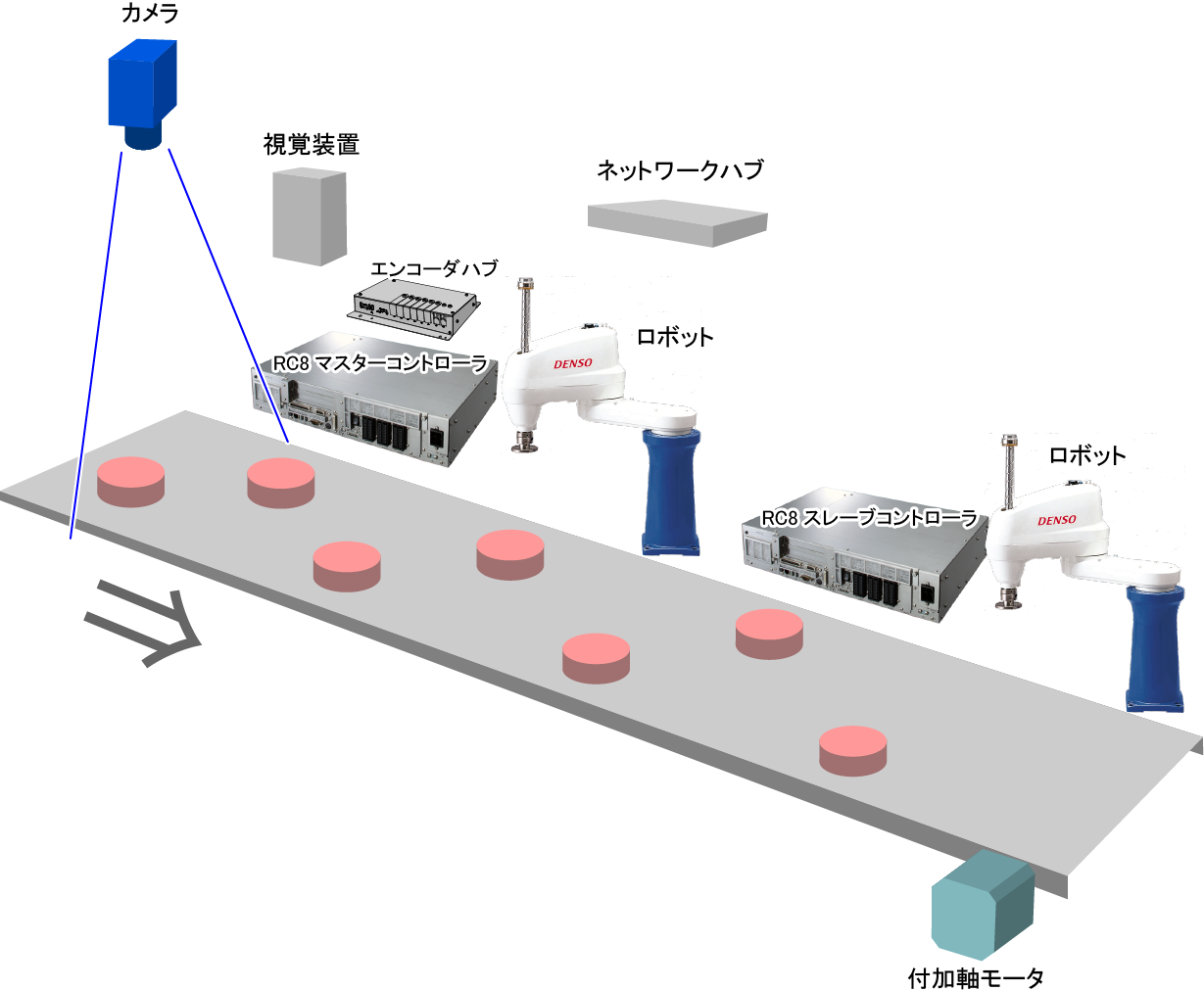
付加軸トラッキング
結線図
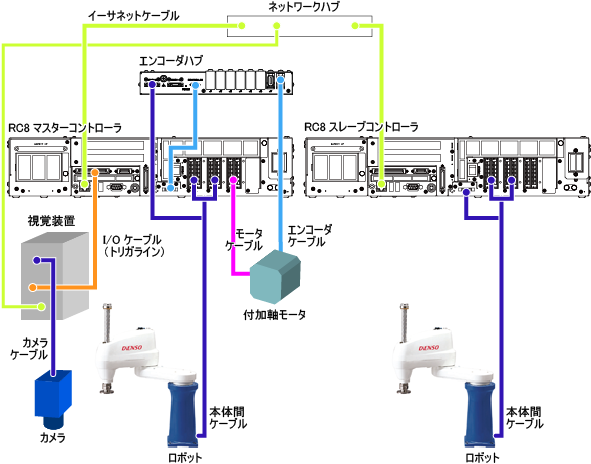
マスタコントローラとスレーブコントローラは同じ仕様(付加軸あり、付加軸トラッキングのライセンスあり、同一ソフトバージョンであることが必要です。
エンコーダハブについて
エンコーダハブは旧品と新規品があります。
新規品を使用する場合、本体間ケーブルのエンコーダ線は、エンコーダハブの"ROBOT-0"と印字されている方 (正面から見て左側) のコネクタに接続してください。
外形寸法および設置上の注意については、"エンコーダハブ"を参照してください。
ID : 5380