
ID : 5361
カメラキャリブレーション実施手順
コンベア上に3点の基準となるワーク/マークを置き、カメラでの計測結果と、ロボットによる位置教示結果との関係より、カメラとロボットの正確な位置関係を計測します。カメラキャリブレーションは、以下の手順で実施します。
キャリブレーションはコンベア毎に実施してください。
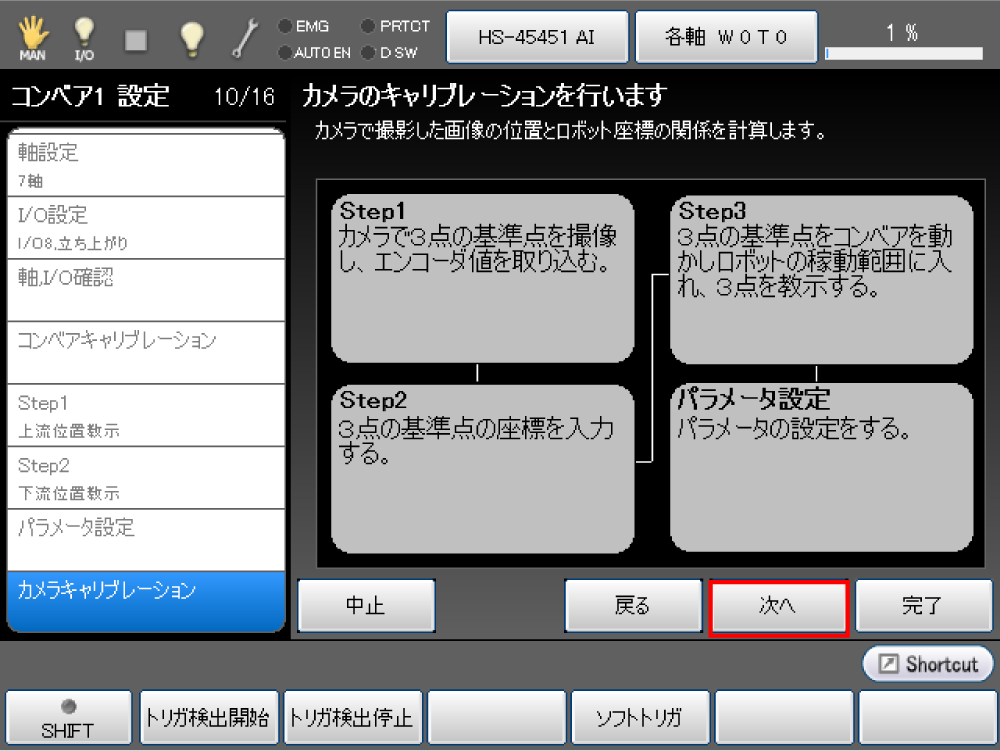
1 キャリブレーション手順の確認
カメラのキャリブレーション手順詳細が表示されますので、内容を確認し、[次へ]を押します。
2 撮影位置のエンコーダ値を取得
教示点3点の撮影と、撮影位置のエンコーダ値を取得します。
コンベア上に基準点を配置し、カメラで3点を撮影します。
また、撮影位置のエンコーダ値を[検出エンコーダ値取得]ボタンを押し、取得します。
トリガ信号によりラッチされた値が取得されます。
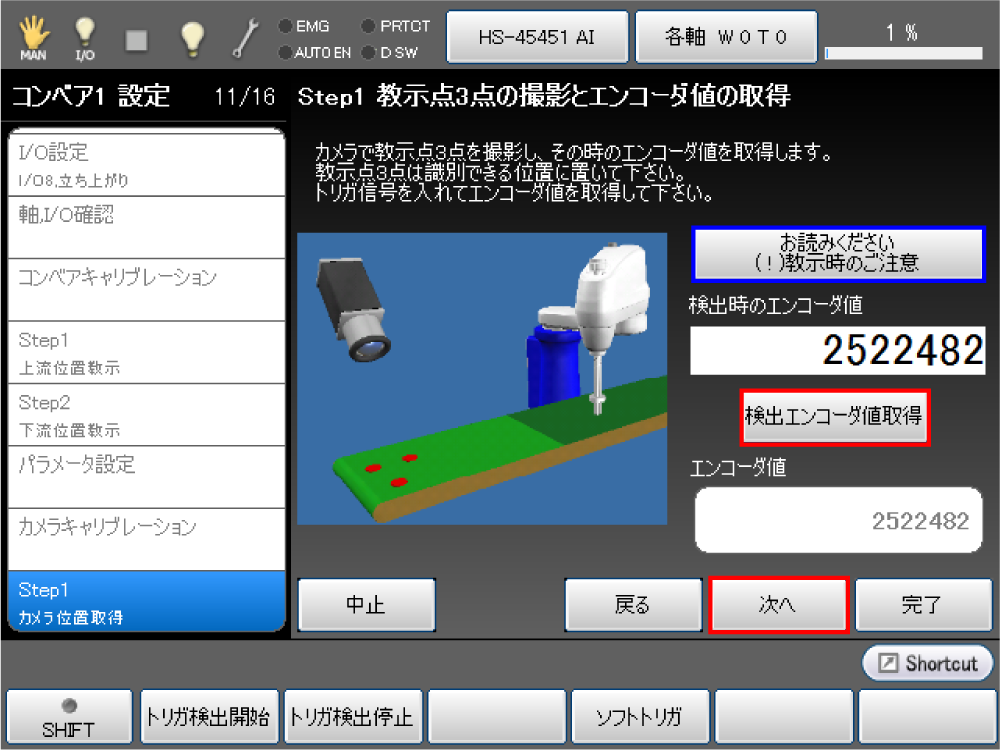
[お読みください (!)教示時のご注意]を押すと、基準点を配置する時の注意事項が表示されます。
[OK] - [次へ]を押します。
3 基準点の視覚座標を入力
撮影した基準点の視覚座標を入力します。
各基準物 視覚座標の数値の欄を選択するとテンキーが表示されますので、値を入力し、[OK]を押して確定します。
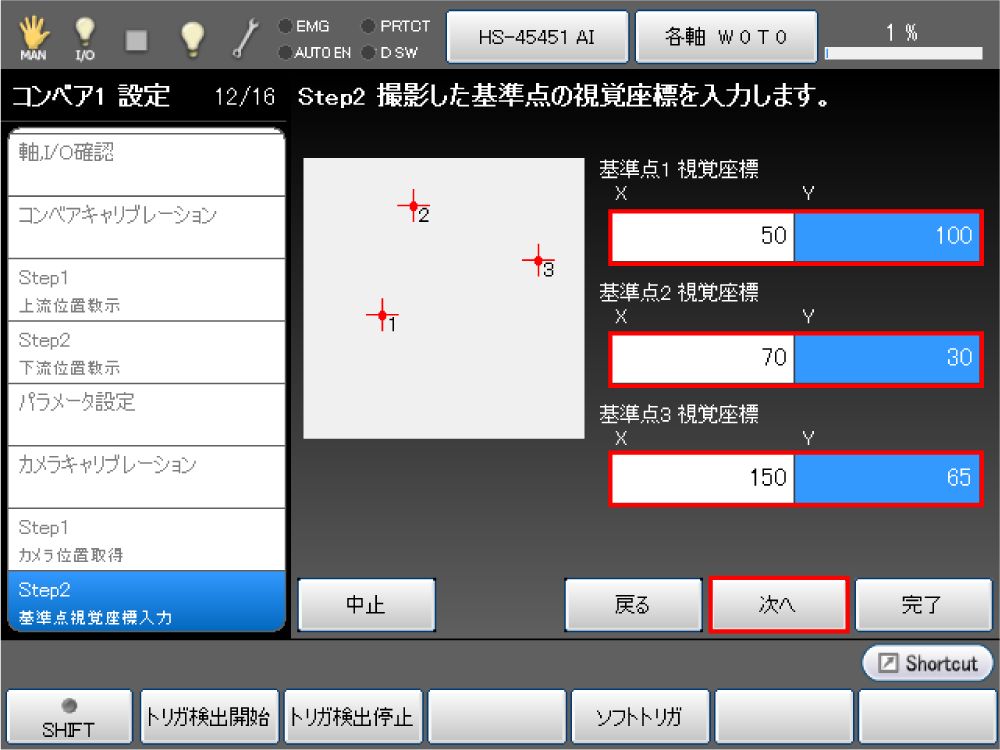
全ての視覚座標の入力が完了後、[次へ]を押します。
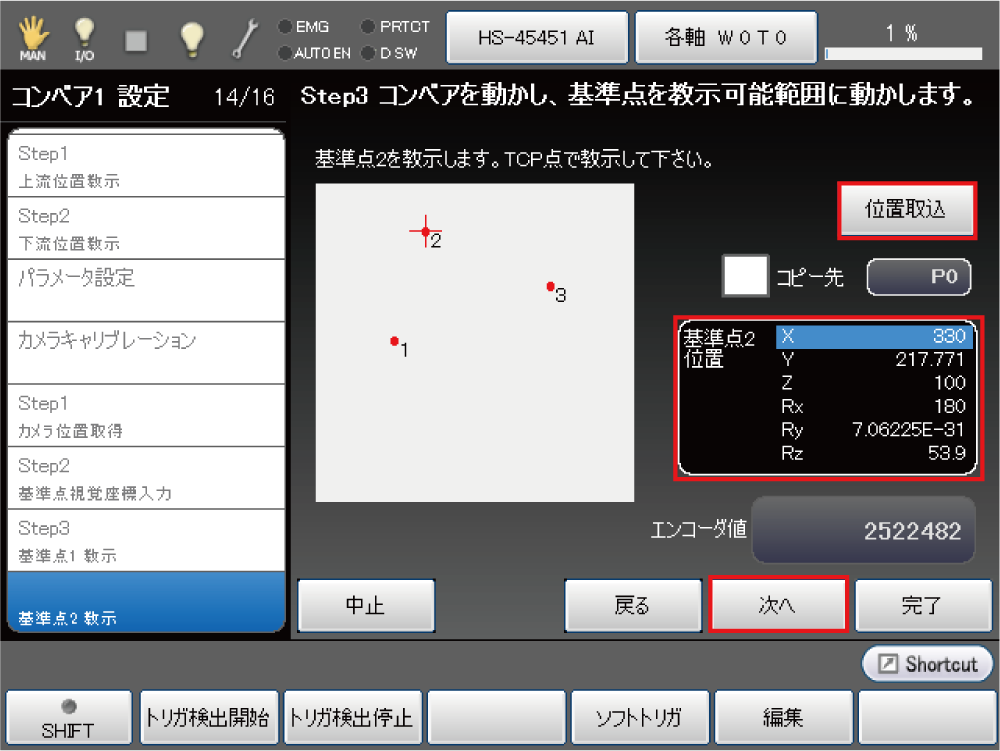
4 基準点のロボット座標取り込み
基準点1を教示します。
コンベアを作動させ、基準点を教示可能範囲に移動させます。
ロボットが基準点を把持可能な位置まで移動させ、ツール先端点(TCP点)にて[位置取込]を押し、教示します。
- 基準点1の取り込み位置を反コンベアベクトル方向に戻した位置が、ビジョンセンサ検出位置になります。
- トラッキング動作時の把持高さは、3点の基準点で作られる平面の高さになります。
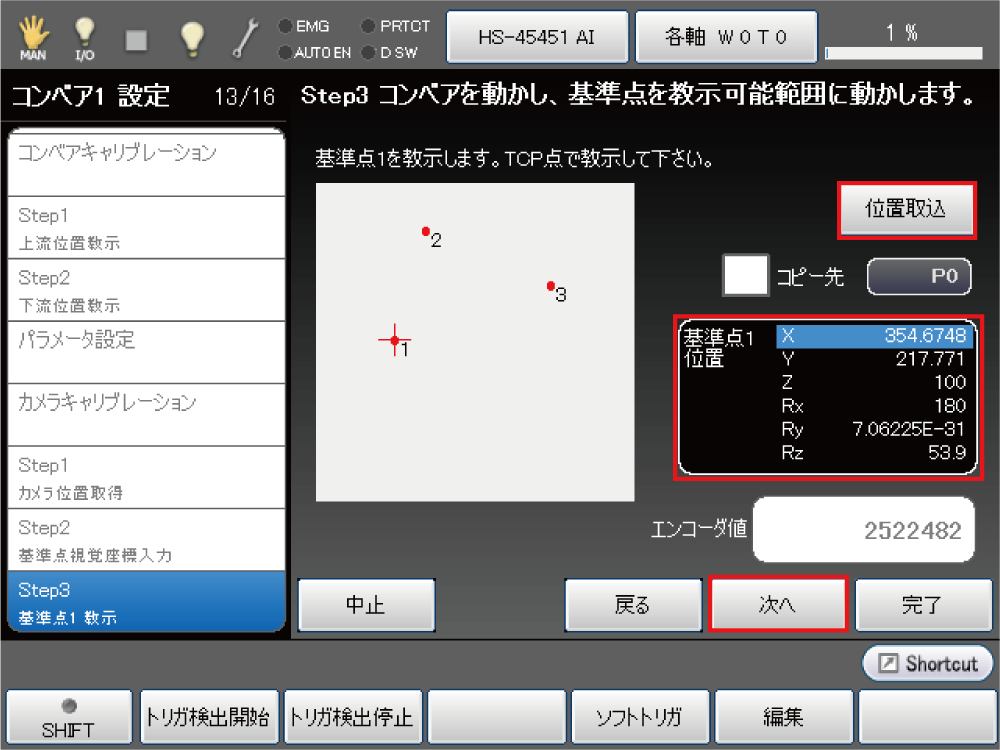
取り込まれた位置を確認し、よければ[次へ]を押します。
基準点2、3についても基準点1と同じ手順で位置を取り込みます。
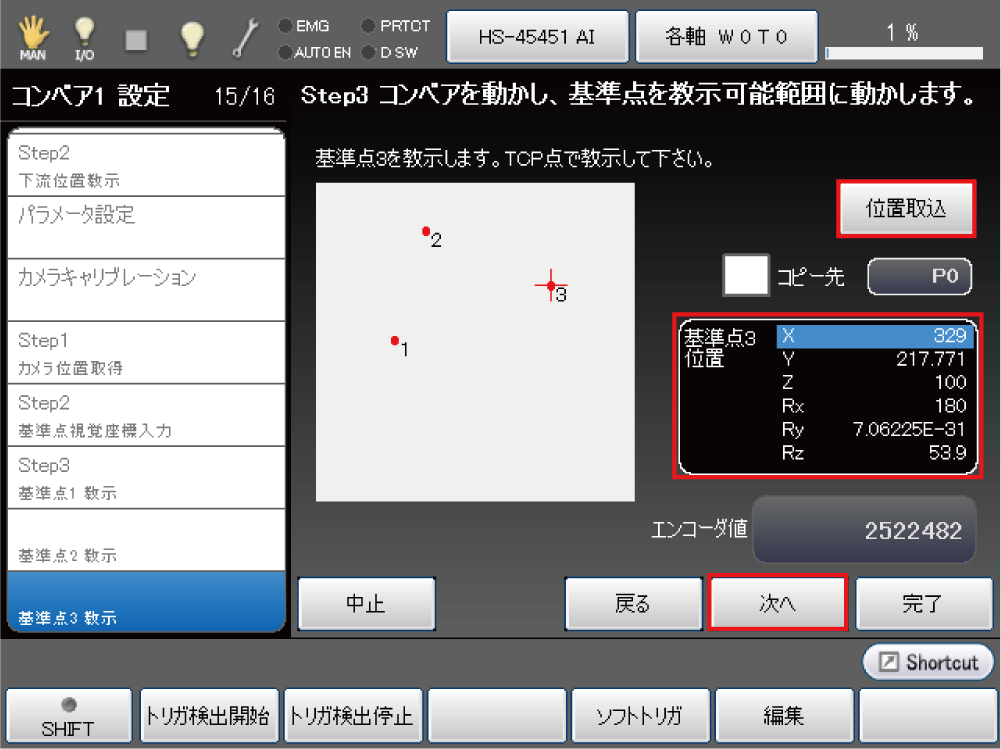
編集ボタンを押すと位置の座標を変更することができます。
コンベア上流と下流の位置取込の座標とその時取得されたエンコーダ値を用いて、コンベアの送り量と方向を計算しています。したがって、コンベアの送り量と方向に影響が出ることを考慮したうえで座標の値を編集してください。
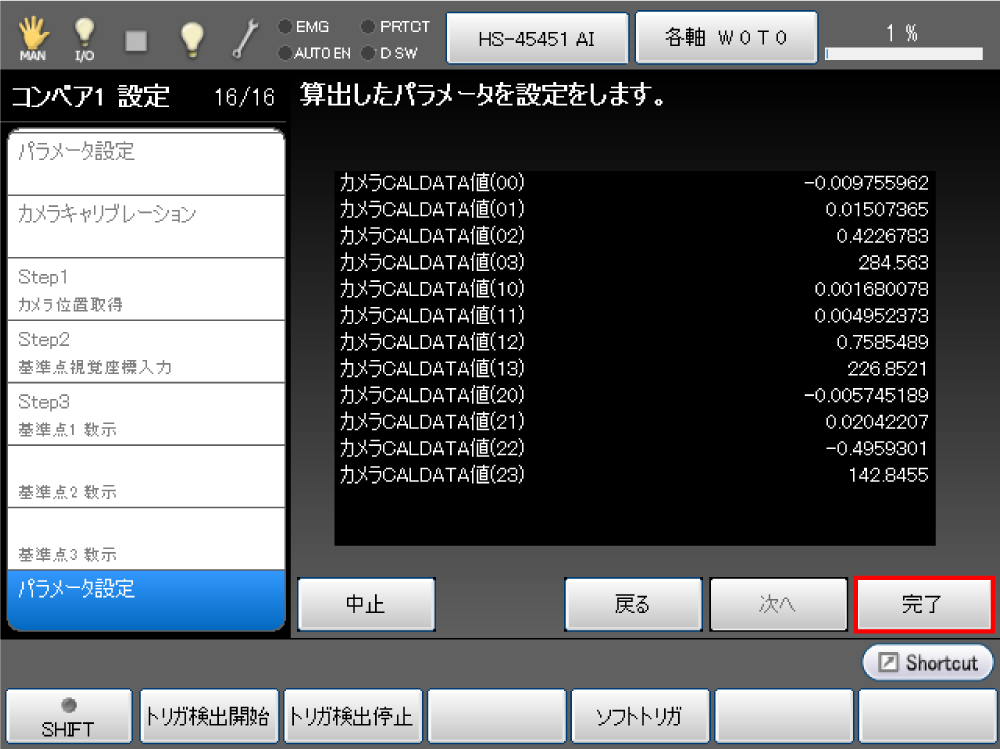
5 キャリブレーション結果の確認
算出したパラメータ値が表示されますので、内容を確認し、[完了]を押します。
6 キャリブレーション結果の反映
システムメッセージが表示されますので、よければ[OK]を押します。
計算したデータがコントローラに設定されます。
[Cancel]を押すと、設定は実行されません。
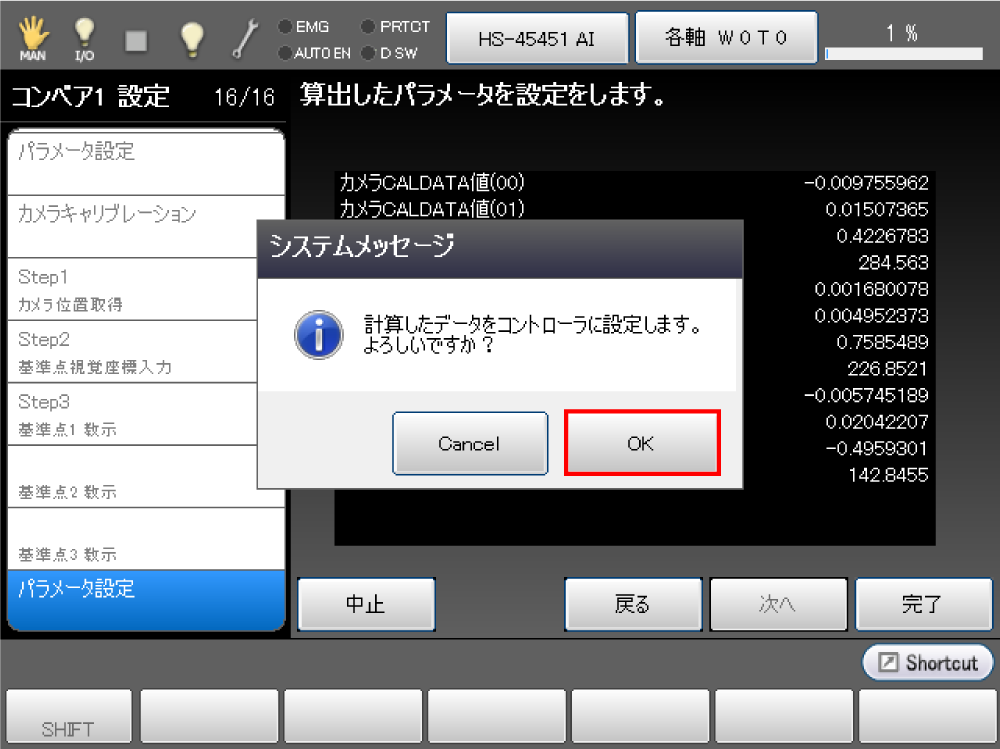
設定が保存され、「トラッキング」画面に戻ります。
コンベア1台、ロボット1台の時のセットアップは以上で終了となります。
ID : 5361