
ID : 5229
基本的なコマンドの説明
プログラム作成で最低限必要なコマンドについて、簡単な動作プログラム例を用いて説明します。
プログラム例
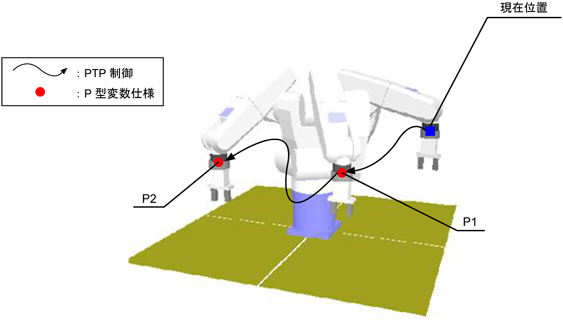
現在位置からP1、P2へPTP制御にて順次アームを動作させます。
プログラムファイル名 PRO1.pcs
'!TITLE "デンソーロボットプログラム"
'プログラムのタイトル( 内容を分かりやすくするための任意のコメント )
Sub Main 'メインプロシージャの宣言
TakeArm Keep = 0 'アーム制御権取得
Speed 100 'アーム移動速度(内部速度)100%
Move P, P1 '指定座標 P1へ移動
Move P, P2 '指定座標 P2へ移動
GiveArm 'アーム制御権開放
End Sub 'プログラムの停止コマンド書式について
- 特殊記号の"[ ]"は、省略可能で必要に応じて記述できます。
- 英文字の大文字、小文字の使い分けは必要ありません。
プログラムファイル名の作成
プログラムを新規作成する際、プログラム編集ウィンドウにて「ファイル名」を入力します。これがプログラムファイル名となり、ウィンドウの上部に、拡張子「.pcs」と共に表示されます。他のプログラムから呼び出すときは、このプログラムファイル名を指定します。
プログラム名の宣言(Sub Main コマンド)
説明
プログラム名や変数などのプログラムの実行時に必要な項目は、実行に先立って宣言します。
特に、プログラム名の宣言を行う場合は、プログラムの最初の有効行で宣言しなければなりません。
メインプロシージャを記述する際には、先頭行に Sub Main を記入します。
書式
Sub Main
プログラムの停止 (End Subコマンド)
説明
このコマンドを実行すると、プログラムによる動作を終了します。
書式
End Sub
アーム制御権取得 (Takearm コマンド)
説明
実行しているプログラムが複数ある状態のときは、制御権のあるプログラムだけがロボットのアームを動作させることができます。ロボットのアームを動作させる動作命令を使用する場合は、必ずTakearm命令を使用し、アーム制御権の取得を行います。
書式
Takearm[アームグループ番号][ Keep = Keepオプション設定値]
アーム制御権の開放 (Givearm)
説明
現在取得しているアーム制御権を解放します。実行しているプログラムが取得しているアーム制御権は、タスク終了時に自動的に開放されますので、End Subを入力する際は省略が可能です。実行している他のプログラムに制御権を譲るときにGivearmステートメントを使用します。
書式
Givearm
アーム移動速度の指定 (Speed コマンド)
説明
内部速度をパーセント(1~100)で指定します。外部速度と内部速度の関係は次の通りです。
実際のアーム移動速度(%)= 外部速度(%)× 内部速度(%)
内部速度を変更すると、それに伴い 内部加速度および内部減速度も変更されます。
- 外部速度とは、ペンダントやPLC等から設定する速度です。
- SPEED命令は、次のSPEED命令を実行するまで有効です。
書式
Speed 速度
コメントの記述 (Remコマンド)
説明
プログラムにコメントを記述します。
"’"(シングルクォーテーション)または"Rem"以降、改行までに入力されている文字列はコメントと認識し、コンパイルや実行をされません。
書式
'[コメント] (または Rem[コメント])
ID : 5229