
ID : 5218
ロボットを手動モードで動かす
ロボットコントローラの電源を入りにすることにより、ティーチングペンダント・ミニペンダントからのロボット操作、あるいはロボットの自動運転が可能になります。
ロボットコントローラの電源を入れる
ロボットを動作させるには、ロボットコントローラの電源を入れることが必要です。
ロボットの動作に必要なすべての電力供給とその制御は、ロボットコントローラが行います。
操作手順
ロボットを手動モードで動かす前には、必ず以下の項目を確認してください。
- ロボットの設置状況が正常であること。
- ロボットの動作範囲に人がいないこと。
1
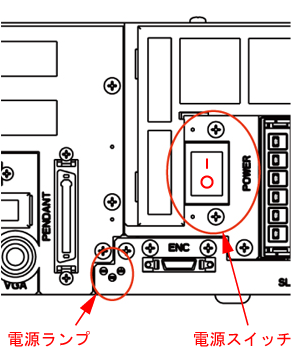
下の図に示すコントローラの電源スイッチの「│」表示側をカチッと音がするまで押して下さい。
電源ランプ (3個のパイロットランプの最も左側)が点灯します。電源を入れた直後は、他の2個のパイロットランプ「自動モード」と「エラー」は一瞬点滅します。
初回のみ、言語選択を求められます。その場合はティーチングペンダント操作ガイドの「ペンダントの表示言語設定 」を参照ください。
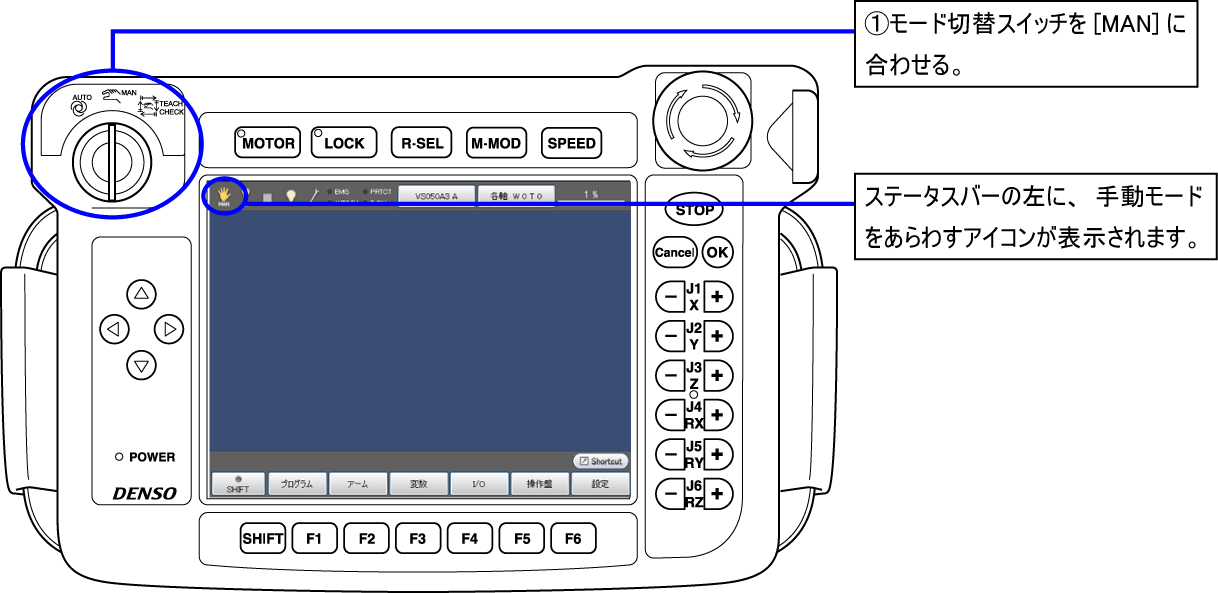
2
手動モードにします。
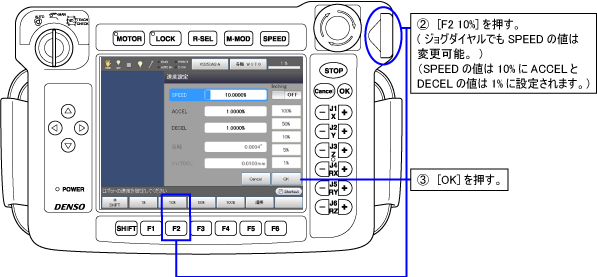
3
速度・加速度を設定します。
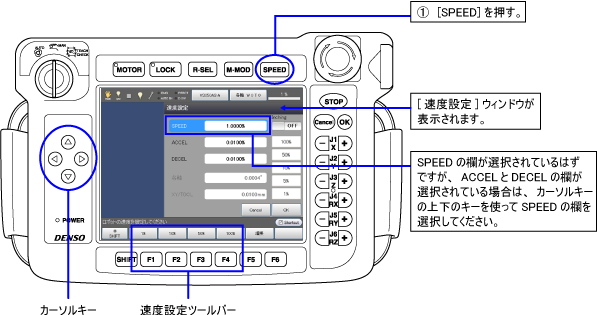
初めのうちは、安全のためにゆっくりと動かすので、この位の値にしておきます。
あとで、様子がわかったところでこの値を入れ直すことができます。

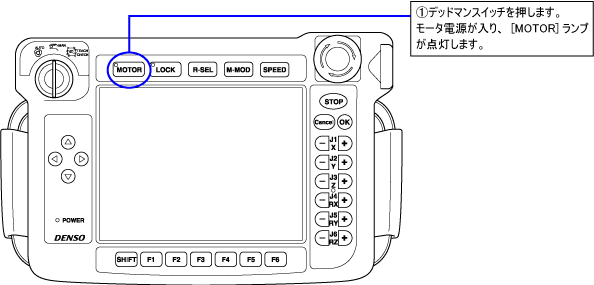
4
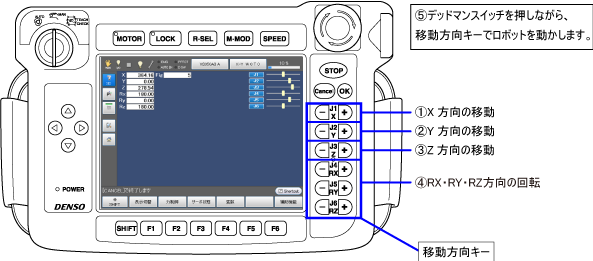
デッドマンスイッチを押します。
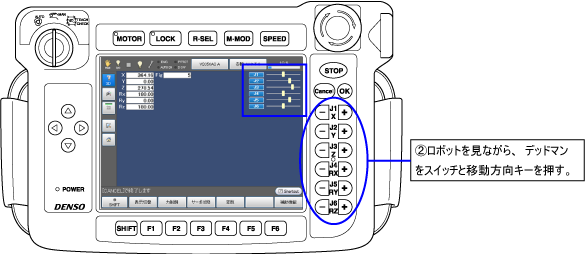
5
手動でロボットの各アームを実際に動作させます。
この操作をおこなうとロボットが動作します。作業者はロボットの動作範囲から出てください。
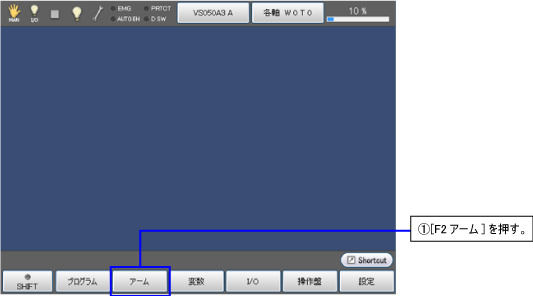
ティーチングペンダント画面に現在位置を表示させたい場合は、[F2 アーム]を押します。
ティーチングペンダント画面に現在位置を表示させなくても、ロボットの各アームの操作は可能です。
4軸ロボットでは、J1~J4、6軸ロボットではJ1~J6 移動方向キーの操作に応じて、ロボットの対応する軸が動きます。
各軸の全ストロークに対する現在の位置が表示されます。
6
動作モードを選択し、手動運転します。
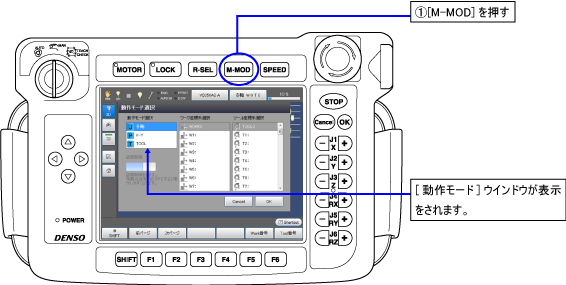
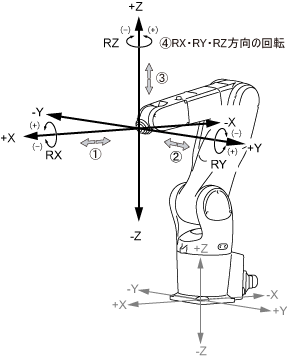
ここではX-Yモードでロボットを運転してみましょう。
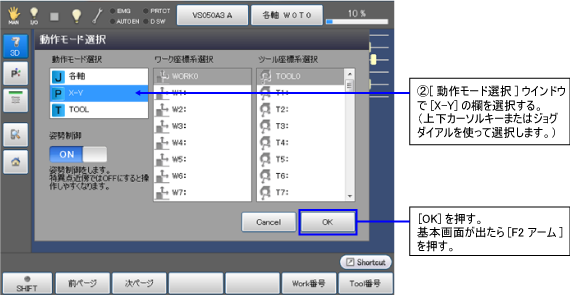


[X-Yモードの動き]
ID : 5218