
ID : 5217
手動モードの種類
手動モードには、各軸モード、X-Yモード、TOOLモードの3種類があります。これらのモードのいずれかで、ティーチングペンダント、またはミニペンダントを使って、ロボットを手動で動作させることができます。
各軸・X-Y・ツールモード別 ロボット操作
| 6軸ロボット | 4軸ロボット | |
|---|---|---|
| 各軸モード | 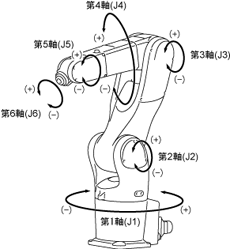 | 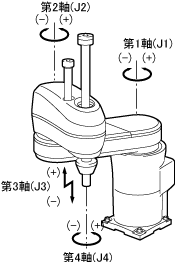 |
| 6個の軸がそれぞれ個別に動作します。 | 4個の軸がそれぞれ個別に動作します。 | |
| X-Yモード | 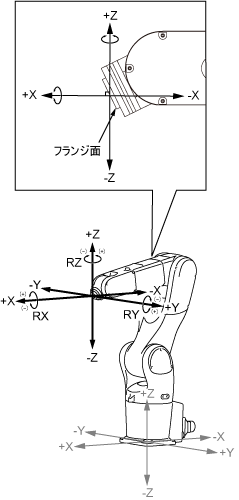 |
 |
| 直交座標に沿って直線動作します。 | 直交座標に沿って直線動作します。 | |
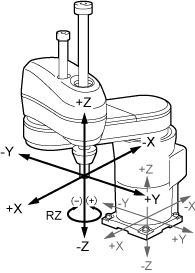
| ツールモード | 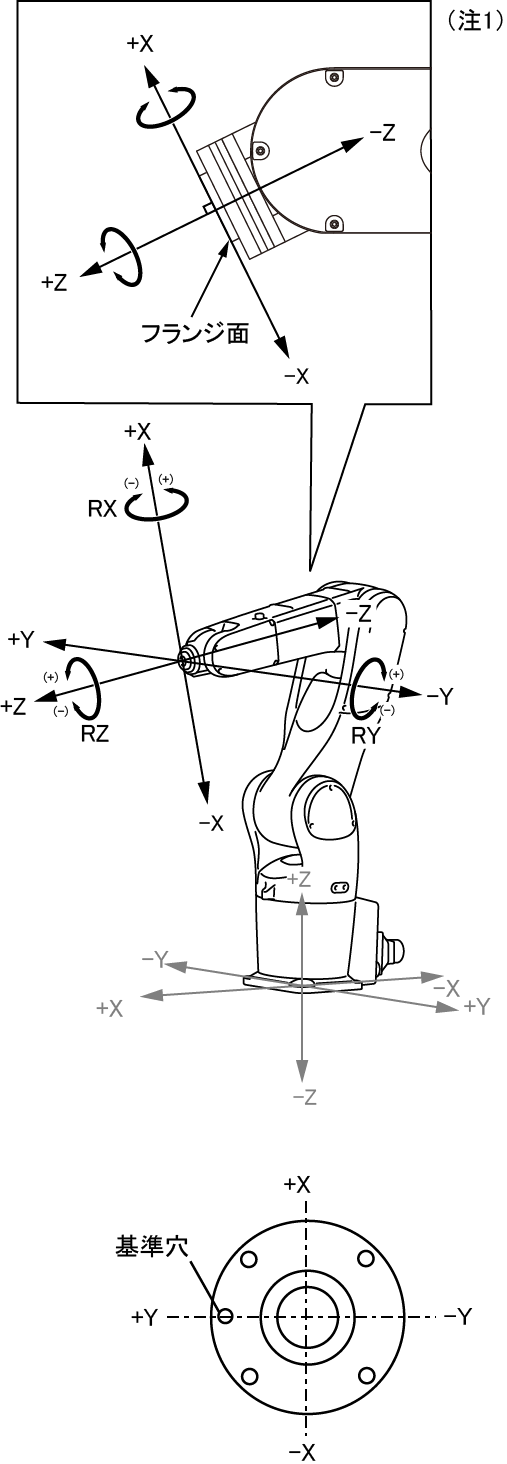 |
4軸ロボットのツール取付け用フランジを
|
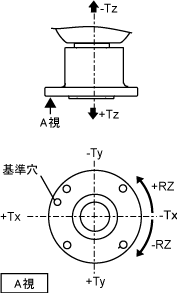
| ロボットフランジ面のX、Y、Z軸に沿って直線動作します。 | 第4軸の直交座標に沿って直線動作します。 |
注1:この図は、TOOL0に設定した場合のツール座標系です。この座標系はメカニカルインタフェース座標系とも呼ばれています。
5軸ロボットでは、フランジが正確にロボットXY平面と平行(RX、RYが0度)の場合のみ、フランジ姿勢(フランジの3次元的な向き)を一定に保てます。それ以外では、フランジ姿勢は同一になりません。
手動モードにおけるロボットの最高速度は、フランジ(メカニカルインタフェース)およびTCP点において250mm/s以下に制限されます。
ただし、TCPから離れた位置にある可動部(ツール周辺部、外部のユーザ配線など)は、制限以上の速度になる可能性があるので注意してください。
(TCP:ツール座標系の原点)
手動モードの切り替え方法
運転開始時は速度を20%以下に設定して操作してください。初めから高速で動作させると、誤ってロボットを周囲の設備に衝突させるおそれがあります。
- ティーチングペンダントを使用する場合
1
モード切替スイッチを[MAN]に合わせます。

2
[M-MOD]を押します。
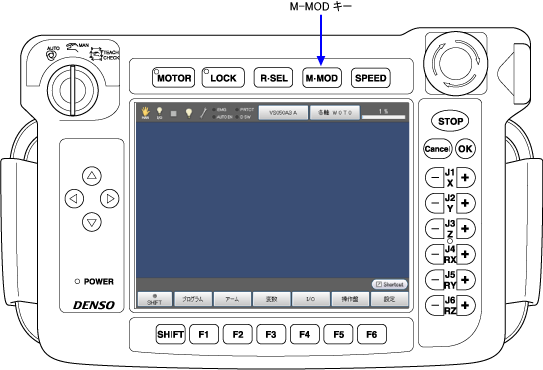
次のステップに示すような[動作モード選択]ウィンドウが表示されます。
3
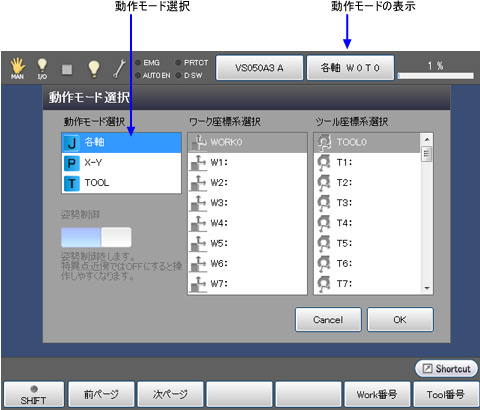
カーソルキーを使うか、画面に直接タッチしてモードを選択し、[OK]を押します。
ステータスバーのモード表示部分に選択した動作モードが表示されます。
ID : 5217