
ID : 5215
ティーチングペンダントの取扱い
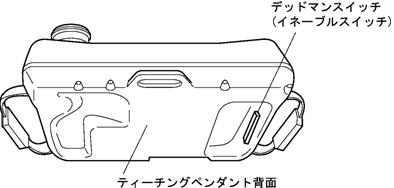
ティーチングペンダントは、手で保持して操作します。ティーチングペンダントには安全確保のためのデッドマンスイッチがあり、下図のように指で押込むことにより操作できます。
ティーチングペンダントの持ち方とデッドマンスイッチ
ティーチングペンダントは両手で持って操作します。

デッドマンスイッチの機能は、ティーチングペンダントを使って手動でロボットを運転している時、予期しない心神喪失、死亡などによって正常な運転ができなくなった場合、自動的かつ安全にロボットを停止させることです。操作者がこのような状態に陥ったとき、このスイッチを押す力は、非常に弱くなるか、あるいは強くなるかのいずれかです。
デットマンスイッチは、つぎの3つの操作状態を認識できるように設計された3ポジションスイッチです。
- 押していないか、押す力が弱いとき→ スイッチはOFF
- 押す力が正常なとき→ スイッチはON
- 押す力が強すぎるとき→ スイッチはOFF
スイッチがONのとき以外は、ロボットは停止し、ロボットを運転することはできません。
ティーチングペンダントは、安全性を確保するために、たとえば手動モード時に移動方向キーを押下してロボットを動かすためには、デッドマンスイッチを同時に押下していなければならないように設計されています。
デッドマンスイッチは、イネーブルスイッチとも呼ばれます。
粘着テープなどを使って、デッドマンスイッチを押下した状態に固定しないでください。手動モードで操作中、必要なときロボットを停止できなくなり、非常に危険です。
デッドマンスイッチを押したまま、手動モードからティーチチェックモード、およびティーチチェックモードから手動モードに切替えた場合、モータ電源はOFFになりません。(Ver.1.13.*以降)
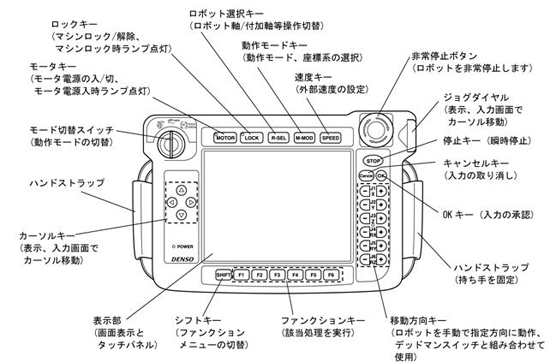
ティーチングペンダントのキー、ボタン、スイッチの名称
ティーチングペンダントのキー、ボタン、スイッチなどの名称を下図に示します。
ロボットの運転を開始する前に、操作を手際よく行い、かつ安全を確保するため、これらのキー、スイッチ、ボタンがどの位置にあるかを正確に把握しておいてください。
ティーチングペンダントの基本画面
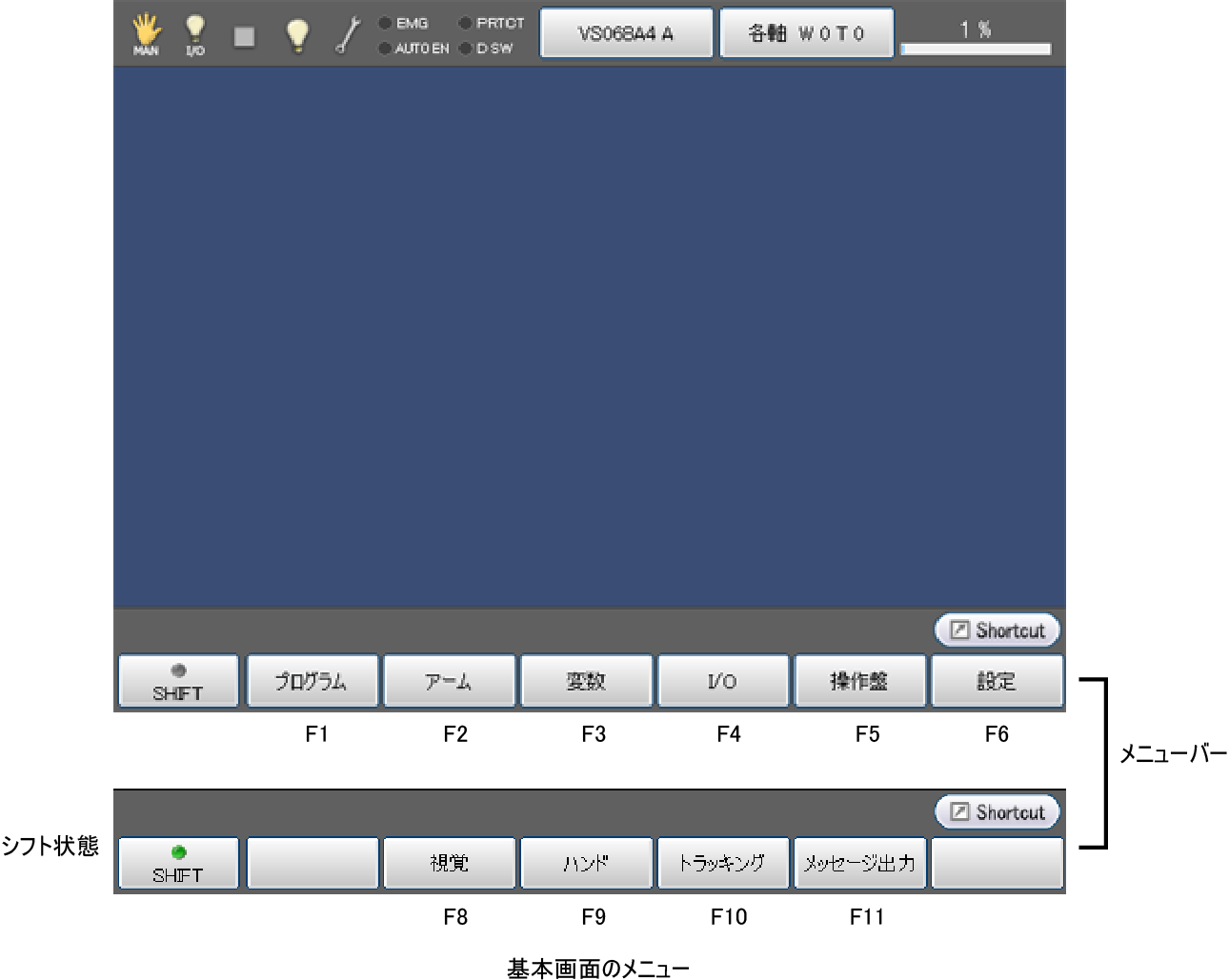
初めてコントローラの電源を入れると、言語選択画面を表示します。
設定方法については、「ロボットコントローラの電源を入れる」を参照してください。
アイコンについて
基本画面に表示される、各状態は以下の表を参照してください。
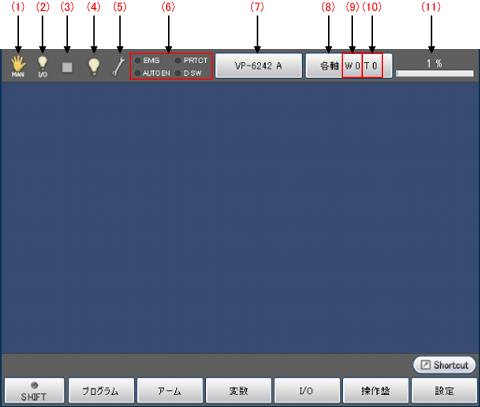
| № | 名称 | 説明 | |
|---|---|---|---|
| (1) | 動作モード |  |
自動モード |
 |
手動モード | ||
 |
ティーチチェックモード | ||
 |
モード未選択 | ||
 |
ダイレクトモード | ||
 |
PCへ送信中 | ||
 |
PCから受信中 | ||
 |
USBへ送信中 | ||
 |
USBから受信中 | ||
 |
VirtualTP/RemoteTPが接続されています | ||
| (2) | 起動権 |  |
任意 |
 |
COM | ||
 |
イーサネット | ||
 |
I/O | ||
 |
TP | ||
| (3) | プログラム実行状態 |  |
プログラム停止中 |
 |
プログラム実行中 | ||
 |
特権タスク実行中 | ||
 |
プログラムと特権タスク実行中 | ||
 |
メッセージ出力 (PrintMsgコマンド実行時に表示) | ||
|
特異点近傍 (特異点近傍時はブザーを鳴らす) | ||
| (4) | I/O状態・アーム状態 |  |
擬似入力未使用かつI/Oロック未設定 (注)I/Oロック:外部機器とのI/O通信を制限 |
 |
擬似入力使用中もしくはI/Oロック状態 | ||
 |
バーチャルフェンス、または排他機能が有効です。 | ||
| (5) | システム状態 |  |
システム正常状態 |
 |
システム異常状態
|
||
| (6) | スイッチ入力状態 | EMG | 非常停止状態 |
| AUTOEN | 自動イネーブル状態 | ||
| PROTECT | 防護停止状態 | ||
| DSW | デッドマンスイッチ状態 | ||
| (7) | ロボット選択ボタン | ロボットタイプの選択と表示 | |
| (8) | 動作モード | J:各軸 P:X-Y モードが表示されます T:TOOL |
|
| (9) | ワーク座標 | 選択しているワークの番号を表示します | |
| (10) | ツール座標 | 選択しているツールの番号を表示します | |
| (11) | 速度ボタン | 外部速度の設定と表示 | |
ID : 5215