
ID : 5209
6軸ロボットの座標系
6軸ロボットを操作するときの座標系には、次の3種類があります。
- ベース座標系
- ワーク座標系
- ツール座標系
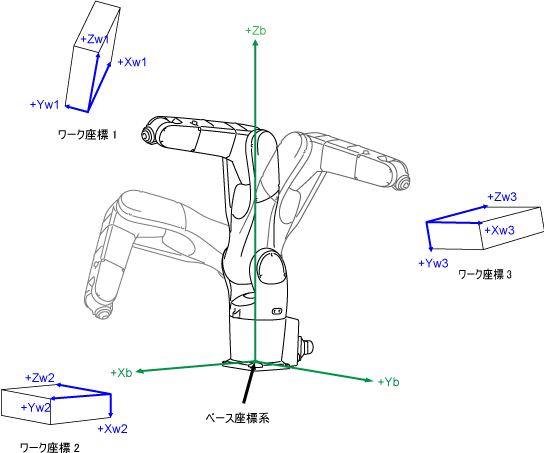
6軸ロボットのベース座標系
ベース座標系とは、ロボットのベース中心を原点とする三次元直交座標です。ロボットの「ベース」とは、ロボットの第1軸を取付ける部分です。
ベース座標系のX軸をXb、Y軸をYb、Z軸をZbと表現します。
6軸ロボットのワーク座標系
ワーク座標系とは、ロボットの作業対象である「ワーク」の作業空間ごとに定義される三次元直交座標です。その原点は、任意の場所に指定できます。
ワーク座標はベース座標に対する座標原点位置(X,Y,Z)とベース座標のX軸・Y軸・Z軸周りの回転角(RX,RY,RZ)で表現します。最大7種類の登録ができ、1~7のワーク座標番号を付けます。
ワーク座標未定義の場合は、ベース座標となります。
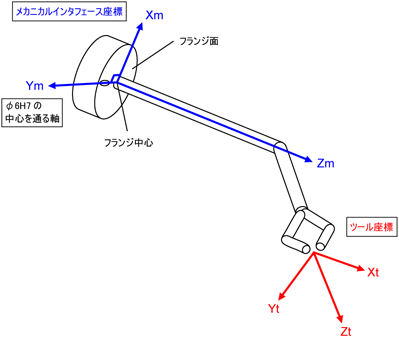
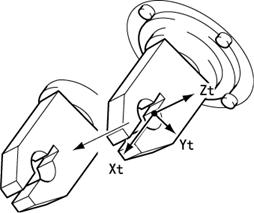
6軸ロボットのツール座標系
ロボットのアーム先端にある、ツール取付け面のことを、フランジと呼びます。また、フランジ中心を原点とする3次元直交座標をメカニカルインタフェース座標系と呼びます。
ツール座標系とは、フランジに取付けたツール先端を原点とする3次元直交座標系です。メカニカルインタフェース座標の原点を基準に、オフセット量や回転の角度を定義します。
下図はVMの例です。
他のロボットのY軸が通る穴は、φ5H7になります。
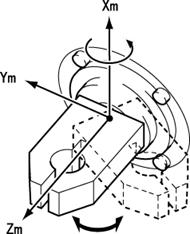
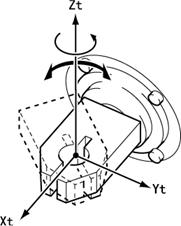
6軸ロボットのツール座標系のメリット
手動モードで動作させる場合、ツール座標系を使用すると、ハンド面を任意の方向へ動かすことが可能になり、ティーチングしやすくなります。
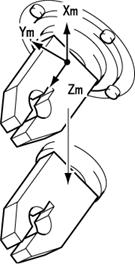
メカニカルインタフェース座標系適用時との動作の比較を、下図に示します。
| メカニカルインタフェース座標系(TOOL0) | ツール座標系 |
|---|---|
X- を押す場合
|
Z- を押す場合
ハンド面を任意の方向へ移動するティーチングが可能になる。 |
RX+ を押す場合
 |
RZ+ を押す場合
ハンドを中心とした回転動作のティーチングが可能になる。 |
ID : 5209