
ID : 4887
サーボモータの選定知識
ロボット等のサーボ機構駆動設計において、最適なサーボモータ出力や減速比を選定する上で必要な知識について説明します。
(1) 負荷駆動トルク(T )の計算

| 記号 | 意味 | 単位 |
|---|---|---|
| モータ軸換算の総慣性モーメント | (Nms²) | |
| モータ軸角加速度 | (rad/s²) | |
| モータ使用回転数 | (rpm) | |
| 制動定数(モータカタログ参照) | (Nm/rpm) | |
| モータ静摩擦トルク(モータカタログ参照) | (Nm) | |
| 伝達系等の摩擦トルク(モータ軸換算) | (Nm) | |
| 動力保持トルク(モータ軸換算) | (Nm) | |
| 干渉トルク、遠心力、コリオリの力等(モータ軸換算) | (Nm) |
(2) モータ最大発生トルク(TM)の計算 (モータ軸換算)
ただし、
| 記号 | 意味 | 単位 |
|---|---|---|
| モータに流せる最大電流値 | (Ao·p) | |
| トルク定数(モータカタログ参照) | (Nm/Ao·p) |
または、モータカタログ記載の「瞬時最大トルク」で表します。
ただし、MC8として駆動トルク "T" はモータ定格トルクの2.5倍以内で設計します。
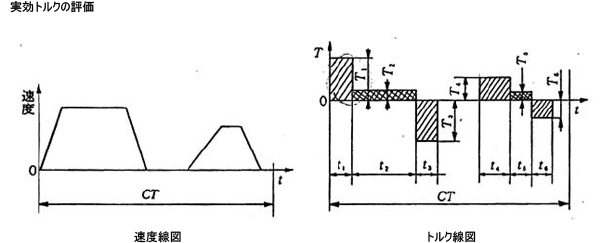
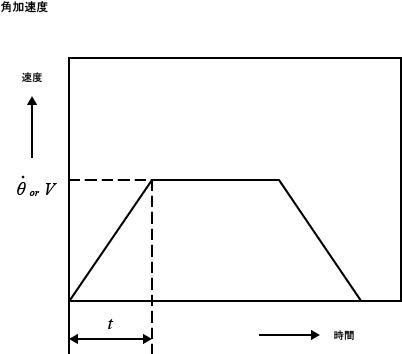
(3) 実効トルクの計算と評価
下図のようなパターンで動作する場合、下式にて1サイクルの実効トルク (Tt) を求めます。
| 記号 | 意味 | 単位 |
|---|---|---|
| 駆動トルク ( (1)式のT ) | (Nm) | |
| 減速トルク ( (1)式の T から摩擦トルク分を減ずる ) | (Nm) | |
| 摩擦トルク + 特殊トルク | (Nm) | |
| (秒) | ||
| サイクルタイム | (秒) |
 |
モータ単体での評価
Tt < TR(モータカタログ記載の定格トルク)のこと
ただし、エンコーダ回路の熱的限界(70℃)により、モータ定格トルクの80%以内で使用します。
モータ定格トルクの80%以上となる場合、エンコーダ回路の温度について測定し、確認します。
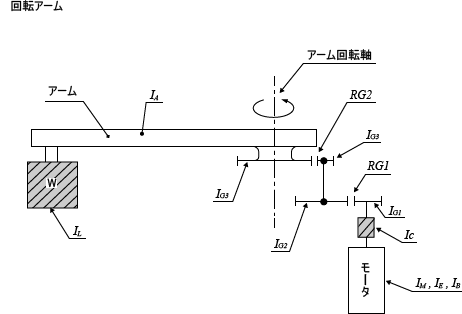
(4) 総慣性モーメント (I ) の計算 (モータ軸換算)
回転アームの場合 (下図)

| 記号 | 意味 | 単位 |
|---|---|---|
| 負荷Wのアーム回転軸回りの慣性モーメント | (Nms²) | |
| アームのアーム回転軸回りの慣性モーメント | (Nms²) | |
| 1段目ピニオンの慣性モーメント | (Nms²) | |
| 1段目ギヤの慣性モーメント | (Nms²) | |
| 2段目ピニオンの慣性モーメント | (Nms²) | |
| 2段目ギヤの慣性モーメント | (Nms²) | |
| カップリングの慣性モーメント | (Nms²) | |
| モータ電機子の慣性モーメント | (Nms²) | |
| エンコーダの慣性モーメント | (Nms²) | |
| 内蔵ブレーキの慣性モーメント | (Nms²) | |
| 1段目ギヤ比 | (1/n) | |
| 2段目ギヤ比 | (1/n) |
 |
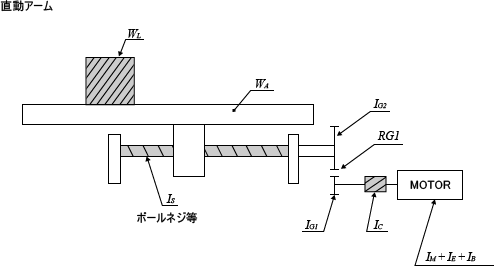
直動アームの場合 (下図)
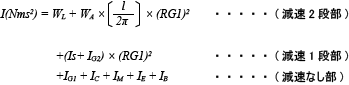
| 記号 | 意味 | 単位 |
|---|---|---|
| 負荷の重量 | (kg) | |
| アームの重量 | (kg) | |
| ボールネジの慣性モーメント | (Nms²) | |
| ボールネジのリード | (m/rev.) |
 |
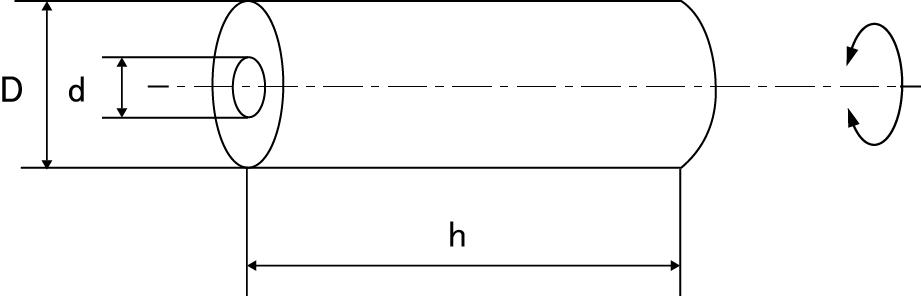
回転体の慣性モーメント (I1) の計算

| 記号 | 意味 | 単位 |
|---|---|---|
| 外径 | (m) | |
| 内径 | (m) | |
| 厚み | (m) | |
| 比重 | (kg/m³) |
慣性がGD²で表現されている場合は4×gで除すること。
回転体
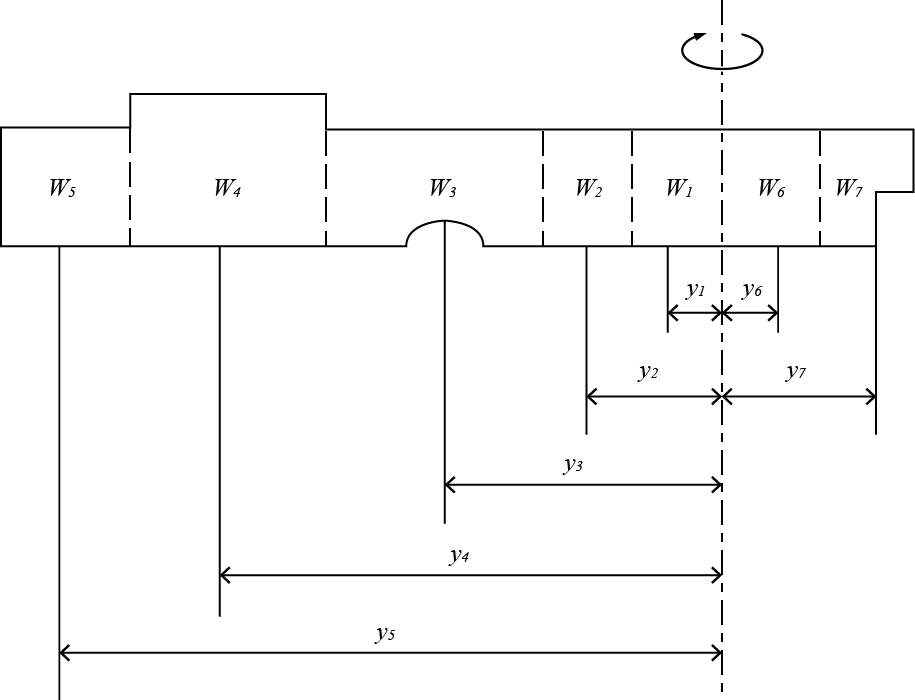
複雑形状体の慣性モーメント (I2) の計算
複雑な形状の物体の慣性モーメントは定式化できないので、物体を分割して、各々の分割片毎に慣性モーメントを求め、その総和を物体の慣性モーメントとします。
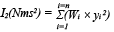
| 記号 | 意味 | 単位 |
|---|---|---|
| 分割片の重量 | (kg) | |
| 回転中心から分割片中心までの距離 | (m) |
複雑形状体
(5) モータ軸角速度 (ω) の計算
回転アームの場合

直線運動の場合

| 記号 | 意味 | 単位 |
|---|---|---|
| 加速時間 | (秒) | |
| アーム回転速度 | (°/s) | |
| 直線速度 | (m/s) | |
| 総減速比 | (1/n) | |
| ボールネジ、ラックピニオン ··· リード | (m/回転) |
 |
(6) 伝達系等の摩擦トルク (TFD)
摺動部やシール、減速機等の摩擦トルクを減速比で除してモータ軸換算の摩擦トルクとします。特に減速する前の伝達機構の摩擦トルクは直接モータに加わるので、充分注意してください。
(7) 重力保持トルク(Tg)
重力保持が必要な場合、保持する物体の重量をギヤ比で除して、モータ軸換算の重力トルクとします。ただしエアシリンダやカウンタウェイトで重力バランスをとる場合は、重力保持トルクは"0"であるが、エアシリンダの摺動抵抗や、慣性モーメントの増加に注意してください。
(8) 特殊な負荷トルク (Ts)
自由度が"2"以上ある場合、他の軸の動作にて、干渉トルクや遠心力やコリオリの力を受ける場合があります。メカの構成や動作速度からこれらの力を求め、ギヤ比で除してモータ軸換算のトルクとします。
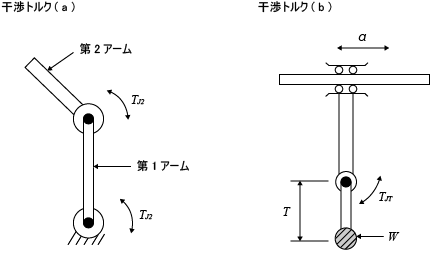
干渉トルクの例
- 2関節アームで、第2アームの駆動トルク (TJ2) が第1アームに加わります。(下図 干渉トルク(a) )
- 直線運動と回転軸の組合せでも直線軸の加速度(α)が回転軸のオフセット荷重(W)に加わり、オフセット距離(r)に比例した回転軸回りのトルク (Tr) が発生します。(下図 干渉トルク(b) )

 |
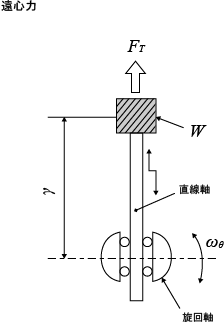
遠心力 (FT) の例
旋回軸上の物体(W)には、旋回軸角速度(ωθ)の2乗と回転半径(r)に比例し、中心から外に向って遠心力 (FT) が発生します。

下図では直線軸が遠心力を支えます。
 |
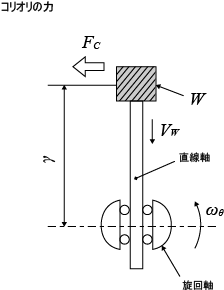
コリオリの力(Fc) の例
旋回軸上の物体(W )が VW の速度で動作するとき、物体(W )には、Wと、旋回軸角速度 (ωθ) と速度 (VW) の2倍に比例し、VWと直角の方向にコリオリの力 (Fc) が発生します。
下図では旋回軸に、コリオリの力 (Fc)と半径(r)を乗じたトルクが発生し、また直線軸には、コリオリの力 (Fc) と摺動部摩擦係数を乗じた摩擦抵抗が発生します。
 |
ID : 4887